石上研究室では,
- Terramechanics (テラメカニクス)
- Autonomous Mobility (自律移動システム)
- Robot Dynamics (ロボットダイナミクス)
- Machine Learning (機械学習)
の4テーマについて研究を行っています.
Terramechanics

クローラ 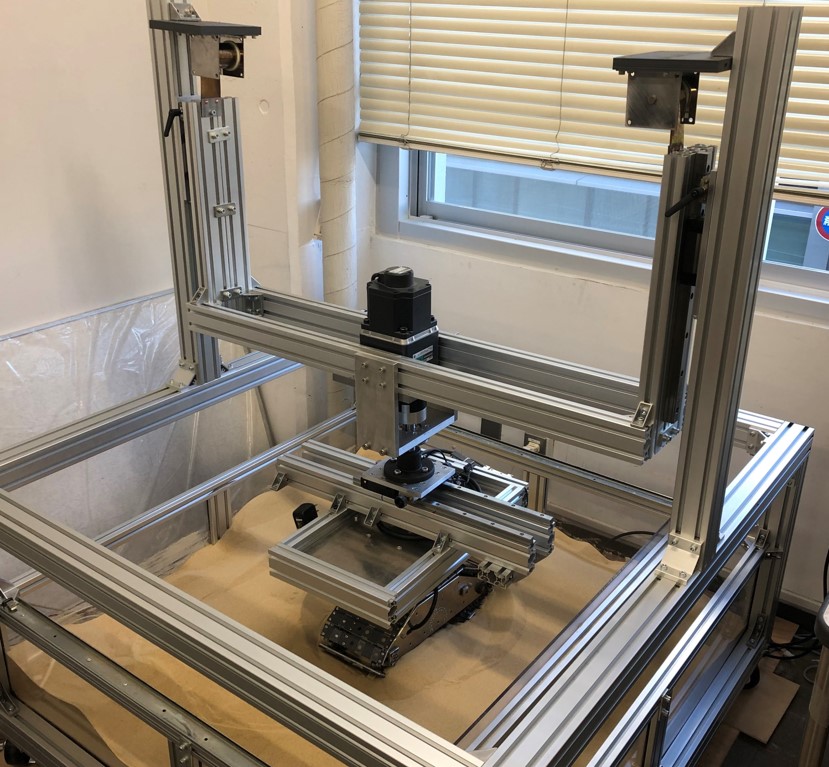
旋回試験装置 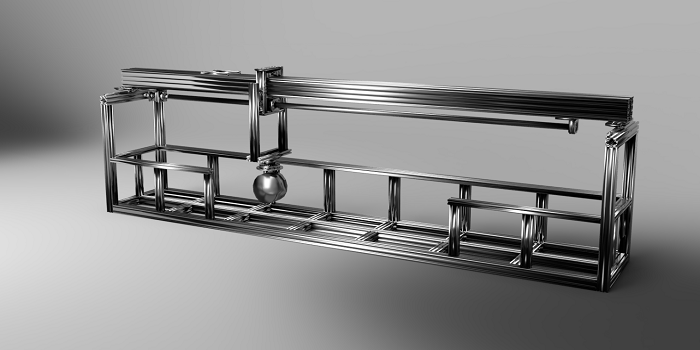
車輪実験装置
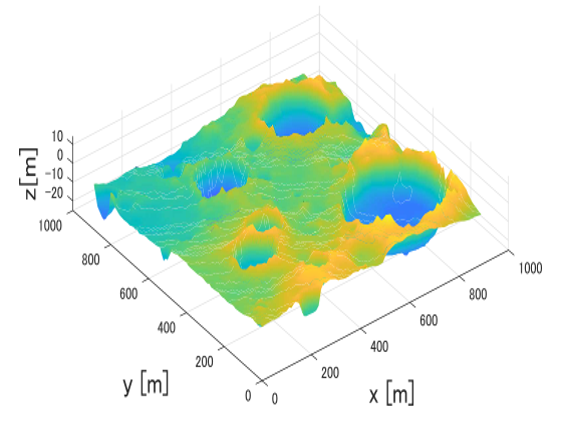
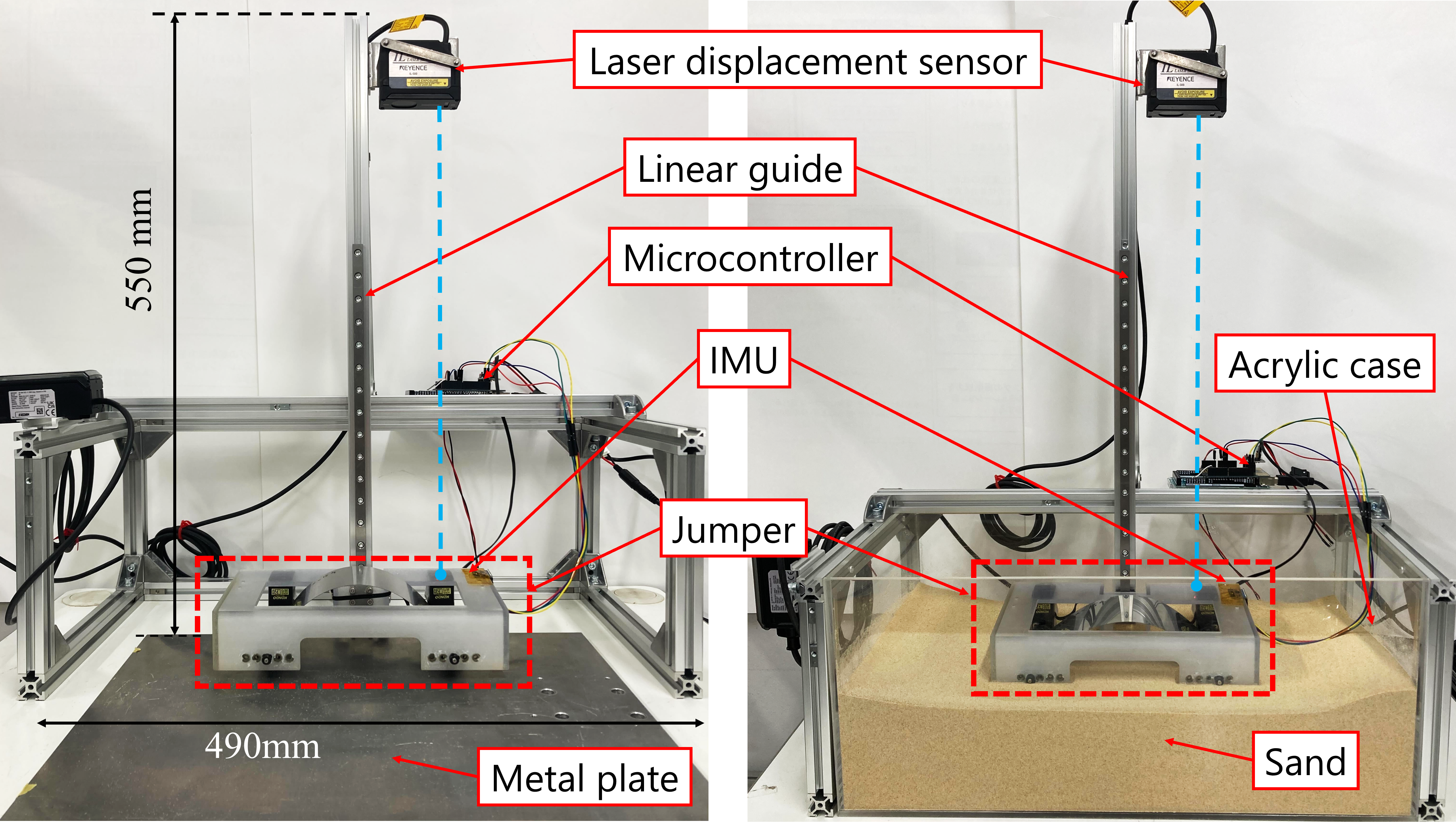
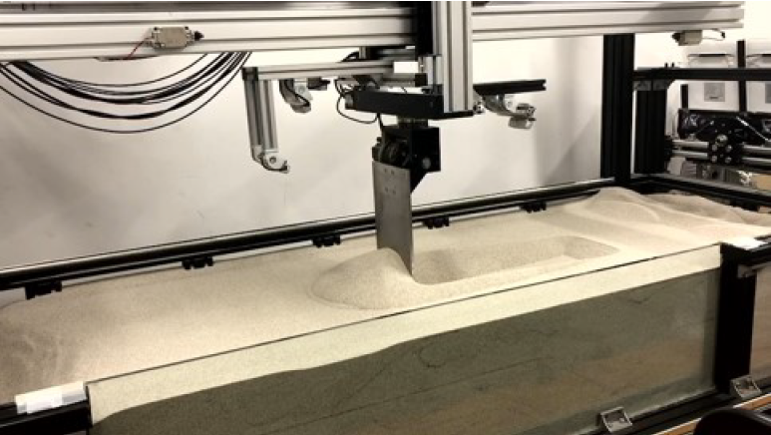
月や火星の惑星表面は,非常に細かな砂(レゴリス)に覆われた 軟弱地盤環境が想定されます. このような砂地上を車輪型の探査ロボットが走行すると, 車輪の滑りに伴うスリップや,砂地への沈み込みによって, 走行不能状態(スタック)に陥る危険性があります. そこで本研究では,機械と土壌の相互力学関係(テラメカニクス)に基づいて, 不整地を走行するロボットの力学モデルの構築をはじめ, 実験的手法によるモデル評価, シミュレーション解析,サスペンションの設計開発などに取り組んでいます.
過去の研究はこちら
Autonomous Mobility
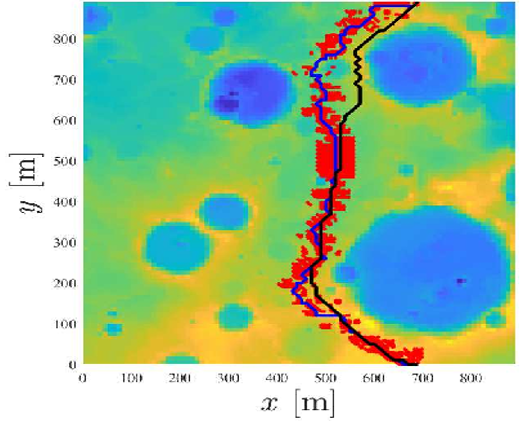
未知環境においてロボットが自律的に移動するためのシステム(航法,誘導,制御=Guidance, Navigation, and Control)の研究開発を行っています.レーザ距離計やカメラ画像を用いた環境認識,自己位置推定,経路計画,遠隔操縦,統合的な知覚情報処理などの研究を推進しています.
詳しくはこちら
Robot Dynamics
極限環境で活躍するロボットは,車輪型ロボットに限りません.本研究分野では,月面や火星上の複雑な起伏にとんだ地形で有用とされるホッピングロボットや,海洋インフラ点検・海洋資源探査など水中環境で活躍するソフトロボットの開発を行っています.さらに,ロボット開発に留まらず,動力学に基づいたロボットの挙動解析や,ロボットに搭載するロボットアームの開発など,極限環境におけるロボットのパフォーマンス向上に資するテーマについても研究を行っています.
過去の研究はこちら
Machine Learning
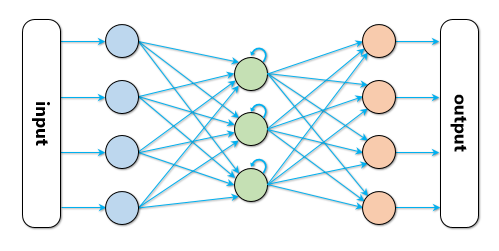
インフラ構築で必要な掘削や排土を行うためには,どの程度の抵抗が機械に加わるのか,掘削・排土中,掘削・排土後砂の様子はどうなるのかを把握することが必要です.限られた取得データから未知の条件下での現象を予測するために,機械学習という手法を使用しています.現在では,Terramechanicsの分野と融合し,時系列予測モデルの構築を中心に過去のデータから様々な予測を行っていますが,Terramechanics以外の分野との融合が可能で,応用範囲が広い分野であるといえます.短時間で高精度な予測を行うことができるよう,研究を進めています.
過去の研究はこちら