未知環境においてロボットが自律的に移動するためのシステム(航法,誘導,制御=Guidance, Navigation, and Control)の研究開発を行っています.レーザ距離計やカメラ画像を用いた環境認識,自己位置推定,経路計画,遠隔操縦,統合的な知覚情報処理などの研究を推進しています.
Contents
過去に行われていた研究
テザーロボットのケーブルと障害物の接触回避を目的とした
経路計画手法の構築
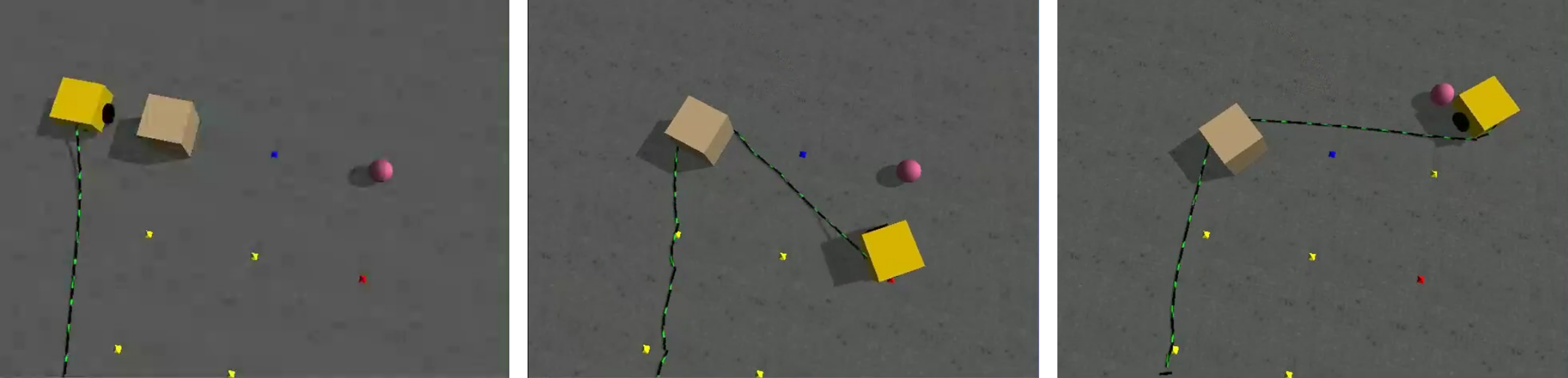
テザーロボットとは,通信や給電のためのケーブルによって環境に接続された移動ロボットのことです.福島原発事故後の建屋内調査や海洋探査などで稼働実績があり,月惑星探査でも利用が検討されています.この種類のロボットは,ケーブルのおかげで長時間の探査が可能である反面,ケーブルの取り扱いの困難さから,ケーブルがロボット自身や障害物に絡まったり,それによって切断したり,と明確なデメリットも存在します.
本研究では,テザーロボットの「ケーブルと障害物の接触回避」の実現を目指しています.特に,ロボットが急カーブを行う際に,ロボットの軌道よりもケーブルの軌道が内側に入り込む現象に着目し,これを避けることがケーブルと障害物の接触回避に有効だと考え,障害物の配置の情報を利用して,どの程度大回りをするかを決定する経路計画アルゴリズムを提案しています.
時空間変化する風速モデルを考慮したUAVのエネルギー消費に
基づく経路計画手法
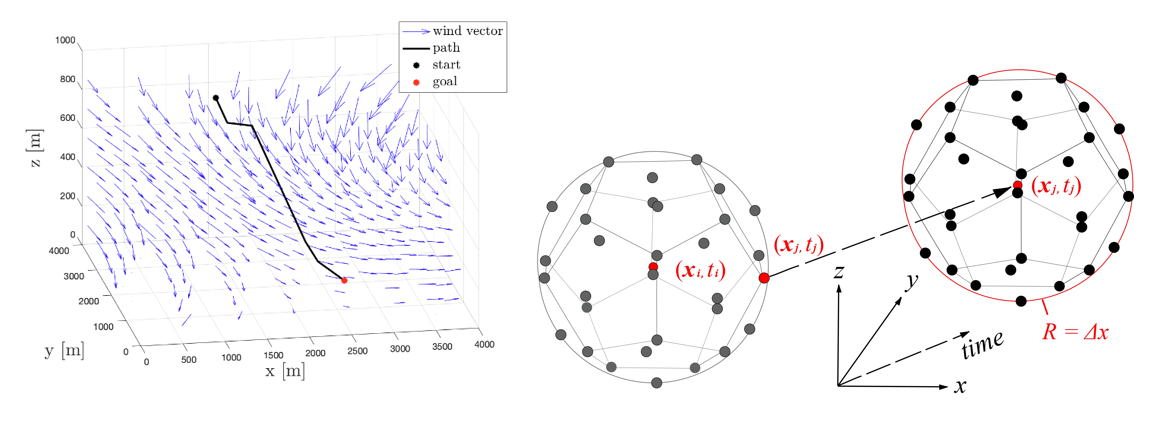
近年ドローンをはじめとする,垂直離着陸や遠隔操縦が可能な無人航空機(UAV)の発展は目覚しく,様々な分野での有用性が認められています.例え ば,UAV による配送サービスは国内外の多数の企業で計画されており,競争的な実証実験が進められています.一方でこのようなUAVの機体は一般的に小さく,搭載できるバッテリーの質量が限られているため,飛行時間,飛行距離に大きな制約があります.さらに,運搬物の質量および風による空気抵抗の増加はUAVのエネルギー消費に大きく影響します.
本研究では,風速モデルを加味したUAVのエネルギー消費をコスト関数として導入し,時空間変化する風環境におけるUAVのエネルギー効率を考慮した大域的経路計画手法を提案しています.
月面移動ロボットによる土質計測を目的とした調査経路生成
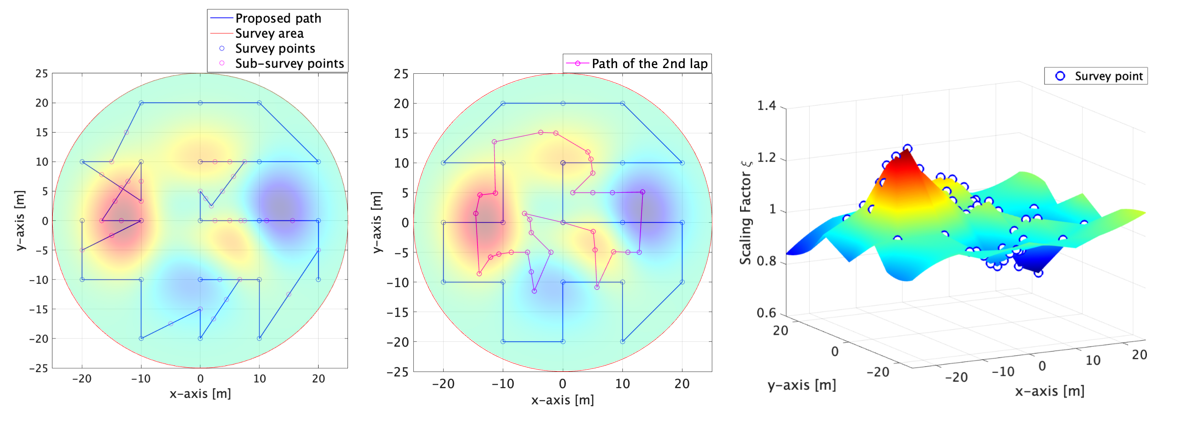
月面着陸基地は,地球から月への大量輸送や将来月面で持続的な活動を行うための重要なインフラです.無人移動ロボットは基地建設の前段階として,複数地点の地盤の硬さを調査することが期待されています.ここで調査に要する時間・エネルギーと調査地点数はトレードオフの関係にあります.
本研究では土質硬さ調査において追加調査地点の位置と数を決定する経路計画を提案しています.
不整地移動ロボットの経路逸脱を考慮した経路計画手法の構築
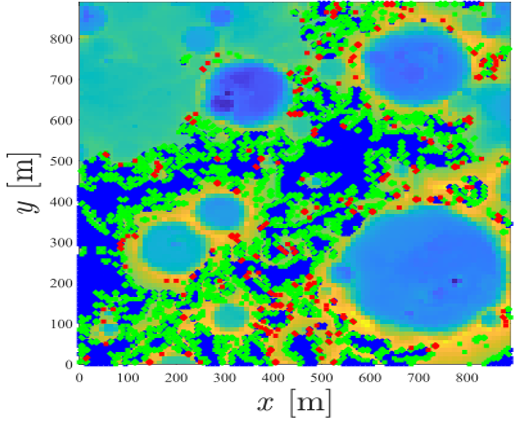
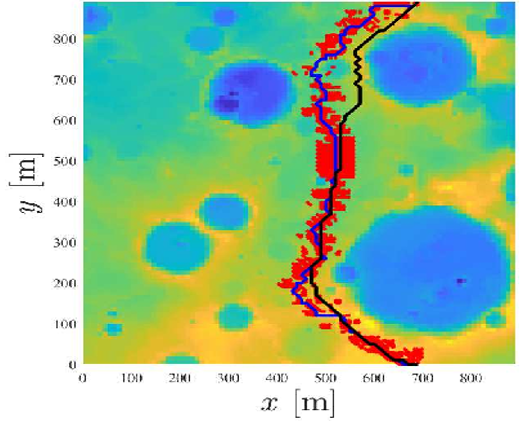
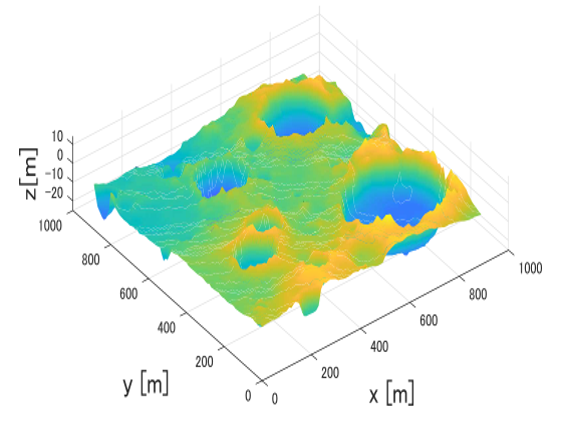
惑星探査ローバによる探査ミッションにおいて,ローバが安全に目的地に到達できる経路を計画することは非常に重要です.しかし,実際にローバに経路を追従させる際に,予測される駆動力と実駆動力に差異が生じ,最悪の場合,ローバを失ってしまうリスクがあります.本研究では,ローバの経路逸脱を考慮した新たなコスト関数を導入した経路計画手法を構築しています.
レーザ距離計の輝度画像を用いた特徴点抽出の高度化
本研究では輝度画像を用いることにより暗所などの照明条件の悪い環境下において,安定した特徴点抽出を行える手法の開発を行っています.照明環境にロバストな輝度画像と,テクスチャを取得できるカメラ画像を相補的に用いた特徴点抽出手法を提案しています.この技術は,レーザ距離計とカメラが搭載されたシステムへの応用が容易であり,ロボティクスのほか,無人施工などの遠隔操縦用システムへの適用も期待されます.
GPSと慣性計測装置を用いた自己位置推定手法
本研究では,GPSなどに代表されるGlobalな位置姿勢情報と,ロボットの慣性計測装置によるLocalな情報を統合し,より安価で利便性の高い「Glocal(Global + local)」な自己位置推定システムの構築を目指しています.この技術は地上インフラに依存せずとも,誤差数センチ単位の高精度な自己位置推定が期待でき,災害救助ロボットや,スマートフォンへの実装も考えられます.
不整地におけるロボットの経路計画手法
本研究では自律移動システムの中でも,未知環境における経路計画についての研究を行っております.経路計画アルゴリズムは,一般的に様々な指標(距離,走行安全性など)から構成される評価関数を用いて,経路を生成しています.とりわけ,各指標に対する重み付けについて,機械学習に基づいた適応的な重み付け手法や,経路計画アルゴリズムの策定といった複合的な研究を推進しています.
ランダムサンプリングによる不整地移動ロボットの経路・動作計画
不整地移動ロボットは,障害物といった走行不可能領域の回避(外的拘束)と,ロボットの駆動性能や操舵性能といった動的制約(内的拘束)の両方を考慮した走行計画を実施する必要があります.そのためサンプリング手法の一つであるRRT(Rapidily-exploring Random Trees)を利用し,移動ロボットの走破性と操舵性を同時に考慮することで,不整地上にて安全に移動可能な経路・動作計画手法を提案しています.