Contents
建設現場や災害現場において活躍している掘削機は無人化や自動化が進められていますが,それによる作業効率の低下が課題として挙げられています.そこで,本研究では掘削時の作業効率向上を目標とした機械学習による土砂変形の予測手法を提案しています.
過去に行われた研究
掘削土砂形状の時系列変形予測モデルの構築

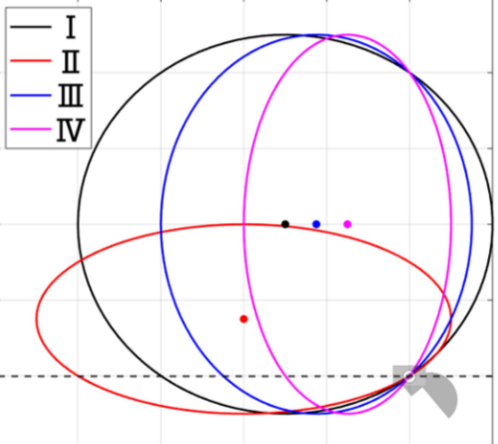
インフラ構築に不可欠な掘削では,砂が崩れることが多く,掘削中,及び掘削後の土砂形状に関して未解明な点が多いです.そのため,本研究では,時系列予測モデルを構築することで,可能な限り正確な土砂形状を予測することを目的としました.過去のテラメカニクスに関する文献の簡易的なモデルではわからなかった,土砂形状の変化を適切に予測することができました.
バケット軌道および土砂形状を考慮した掘削抵抗の時系列予測モデルの構築・高精度化
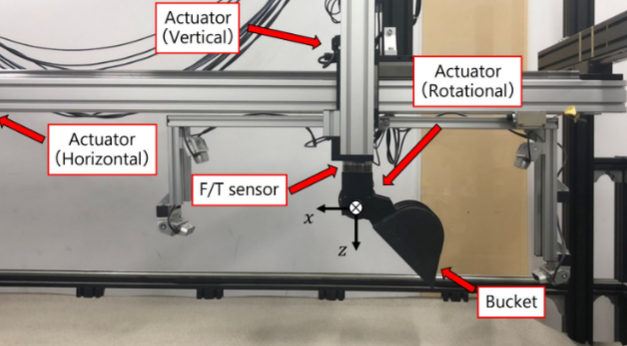
掘削中の建設機械の事故は避けるためには,バケット(砂をすくい上げる部分)のにかかる抵抗を適切に評価しなければなりません.本研究では,様々なバケットの軌道を用いて実験を行い,掘削抵抗の予測を行いました.また,過去の研究では,掘削実験の回数は水平な砂表面から1回のみである場合がほとんどでしたが,複数回の掘削における掘削抵抗の予測を行い,より実現象に近い環境下を想定しました.
転移学習を用いた月面作業ロボットの仕事量予測手法の構築

月面での効率的な作業を行うためには,仕事量を予測することが重要です.しかしながら,地上の作業データに比べ,月面での作業データは限られています.そのため,本研究では,転移学習を用いて,地上の作業と一部の月面でのデータから,目的とすべき月面環境下での仕事量の予測を行いました.
このように本研究室では,掘削や排土などのインフラ構築において,過去の文献では予測できなかった研究領域に対し,様々な機械学習の手法を使用することで,未知の環境下の予測に取り組んでいます.