極限環境で活躍するロボットは,車輪型ロボットに限りません.本研究分野では,月面や火星上の複雑な起伏にとんだ地形で有用とされるホッピングロボットや,海洋インフラ点検・海洋資源探査など水中環境で活躍するソフトロボットの開発を行っています.さらに,ロボット開発に留まらず,動力学に基づいたロボットの挙動解析や,ロボットに搭載するロボットアームの開発など,極限環境におけるロボットのパフォーマンス向上に資するテーマについても研究を行っています.
Contents
過去に行われていた研究
IPMCアクチュエータを駆動源とする扁平で高い柔軟性を有するヒラムシ型水中ソフトロボットの開発
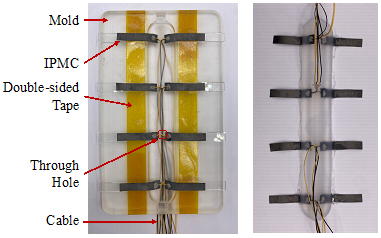
水中ソフトロボットはその柔軟性や環境適応力の高さにより,珊瑚礁域など海の生態系に富んだ環境での活用が可能となります.これにより,人間が行くことができない環境でも海底資源調査や水中構造物点検といったタスクをこなすことができます.本研究では,優れた遊泳能力を持つ無脊椎動物,ヒラムシに着目しました.IPMCアクチュエータを用いることで,ヒラムシのように扁平さと柔軟さを兼ね備えつつ,羽ばたき動作によって遊泳するロボットの開発に成功しました.
SRG
弾性板の飛び移り座屈を用いたホッピング機構の開発と動的挙動の解明
ジャンプ機構を備えた小型軽量の探査機は,月や惑星探査において,クレーターや溶岩洞窟のような,従来の車輪付きロボットでは横断できないような困難な地形を探査するための有望なモビリティです.本研究では,スナップスルー座屈を利用したシンプルで軽量な構造のジャンプ機構を考案しました.考案した機構(ジャンパー)は,薄い弾性ストリップを用いてスナップスルー座屈を能動的に発生させ,地面を蹴ることでジャンプさせます.
SRG
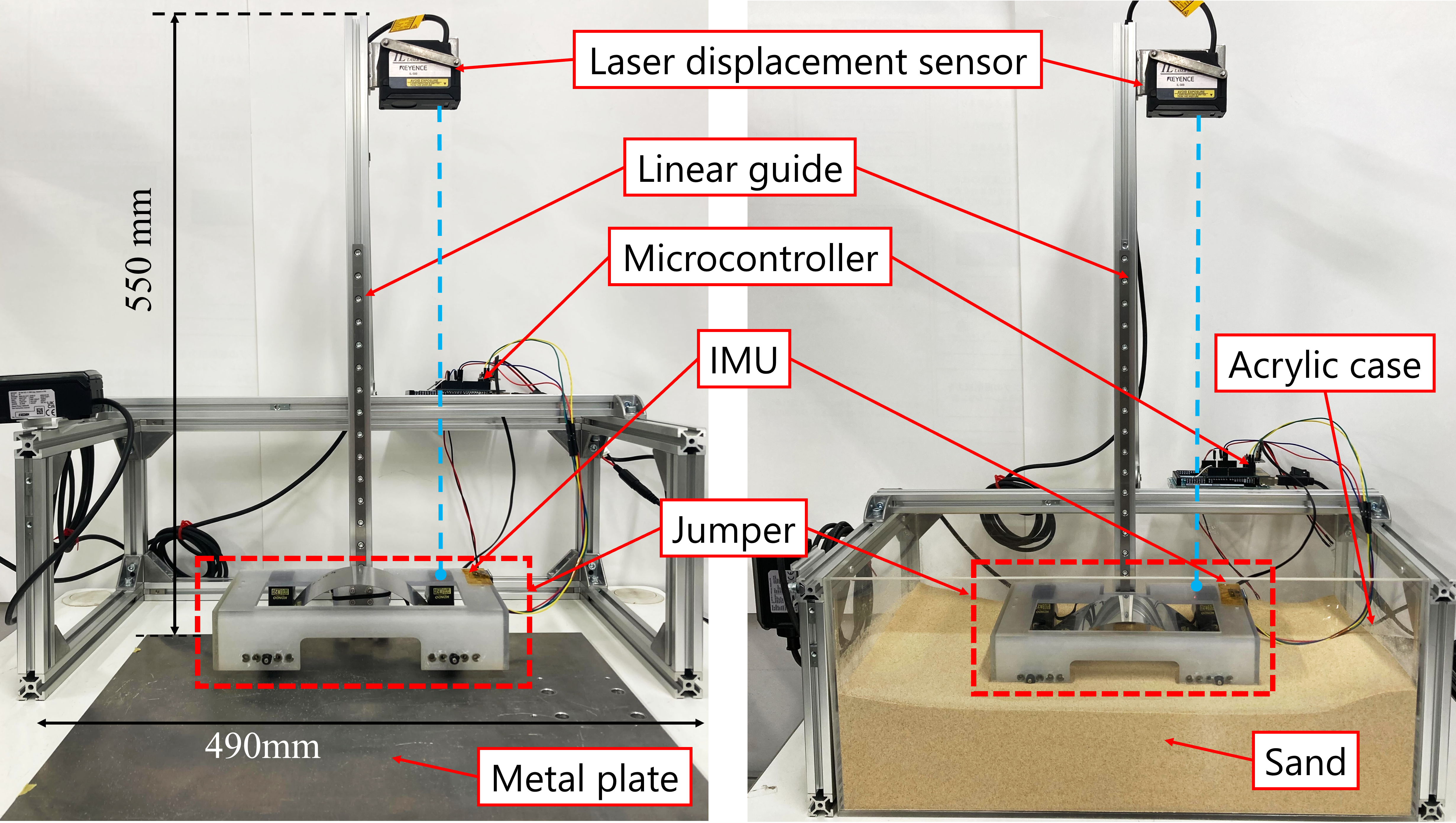
移動ロボット搭載の土質特性調査ツールの開発およびフィールド実験
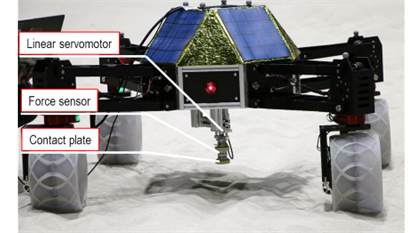
NASAが主導するアルテミス計画や国際宇宙探査協働グループによって作成された国際宇宙探査ロードマップでは,今後数十年の間に月面インフラを構築することに焦点が当てられています.月面におけるインフラ構築では,構築の設計段階において月面表層の土質パラメータを推定することが不可欠です.本研究では,Resistive Force Theory (RFT) と呼ばれる理論における土質の硬さを表す「スケールファクタ」というパラメータに着目し,スケールファクタの同定を行う小型調査ツールの開発を行いました.
SRG
スカイクレーンの能動的制御による火星探査ローバの着陸安定性向上に関する動力学シミュレーション

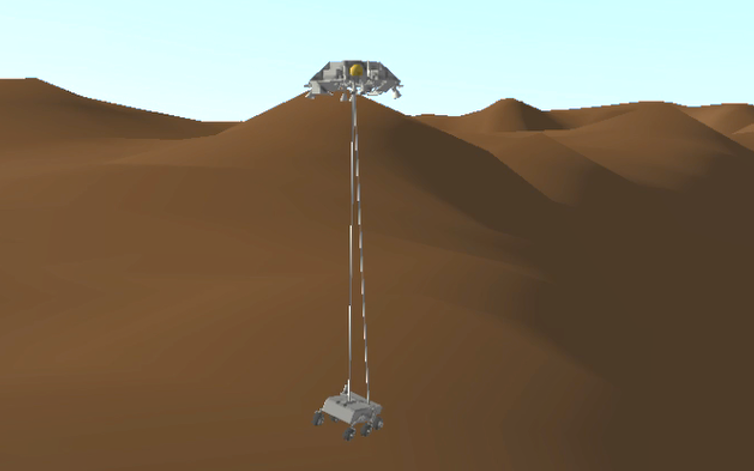
本研究では,探査ロボットの着陸方式の一つであるスカイクレーン方式の3本のワイヤケーブルの独立制御が可能な機構を考案し,空中での探査ロボットの姿勢制御を可能にしました.これによる探査ロボットや降下ステージへの着陸負荷の軽減や着陸可能領域の拡大が期待されます.
SRG
月面有人与圧ローバの旋回特性解析に基づいた操縦安定性向上のための車両設計指針の提案

2020年代後半の有人月面探査に向けて,JAXAとトヨタ自動車が中心となって有人与圧ローバの研究が行われています.本研究は,動力学シミュレーションによって旋回運動を解析することで,操縦安定性の観点から見て適切な車両設計パラメータを求めることを目的としています.
SRG
相似則に基づいた火星衛星探査機の着陸挙動における模型実験
2024年打ち上げ予定のJAXAの火星衛星探査計画Martian Moons eXploration (MMX) では,探査機が衛星に着陸する際の安全確保や着陸後の挙動予測のため,探査機が着陸時に受ける衝撃力の推算が求められています.本研究では,火星衛星と地球の重力の違いを考慮した力学的な相似則に基づき,模型落下実験装置を開発しました.探査機模型が受けた衝撃力から,探査機実機が受ける衝撃力を,相似則により推算しています.
SRG
正二十面体形状を有する展開型ロボットの開発と挙動解析
小惑星の表面の様子や内部特性を知るためには, 惑星表面を移動しながら探査を行うロボットが必要です. 小惑星探査を行うロボットには, 宇宙へ運送しやすく, 微小重力環境で動作し, 省電力で駆動することが求められます.そこで本研究室では, 単駆動源で展開, 折り畳み動作可能な正二十面体型のロボットの開発, およびロボットの微小重力空間下での挙動解析を行っています.
SRG
球型全方向観測ロボットの開発
2012年,月周回衛星SELENEによって,月内部の溶岩チューブに繋がっていると考えられる縦孔が発見されました.溶岩チューブは,将来の月での活動の拠点を設営するのに最適な環境であると考えられており,そのために縦孔内部の調査は重要な課題となっています.そこで,本研究では,縦孔をはじめとした特殊な地形,環境を想定した球体型の全方向観測ロボットの研究,開発に取り組んでいます.
SRG
代替支援活動用ロボットに搭載するロボットハンド駆動システムの開発
宇宙飛行士は宇宙船外にて機器の管理・組立などの作業を長時間にわたり行うため,作業時間の削減や危険性回避を目的とした代替支援ロボットの導入が注目されています.上述の作業を行うためには,対象物を高握力で把持し,任意の姿勢をとることができるロボットハンドが必要となりますが,これらは大型で複雑な機構になりやすい等の課題があげられます.そこで,把持と操作を簡易な構造により実現することを主眼として,ロボットハンドの駆動システムの提案を行っています.
SRG
土壌掘削時/岩盤掘削時のマニピュレータ制御
従来のマニピュレータは,岩石を削る,あるいは砂を掘削するといったツール自体の機能を実現することに特化していました.しかし,太陽光発電を主な電力源としている惑星探査機では,使用できる電力が極めて限られているためロボットアームを低消費電力で運用する必要があります.そこで本研究では,ロボットアームによる高効率かつ低消費電力な土壌サンプリング法ならびにドリル掘削時のエネルギ効率向上を目的とし,マニピュレータの制御法の検討を行っています.