テラメカニクス ~Terramechanics~
月や火星の惑星表面は,非常に細かな砂(レゴリス)に覆われた
軟弱地盤環境が想定されます.
このような砂地上を車輪型の探査ロボットが走行すると,
車輪の滑りに伴うスリップや,砂地への沈み込みによって,
走行不能状態(スタック)に陥る危険性があります.
そこで本研究では,機械と土壌の相互力学関係(テラメカニクス)に基づいて,
不整地を走行するロボットの力学モデルの構築をはじめ,
実験的手法によるモデル評価,
シミュレーション解析,サスペンションの設計開発などに取り組んでいます.
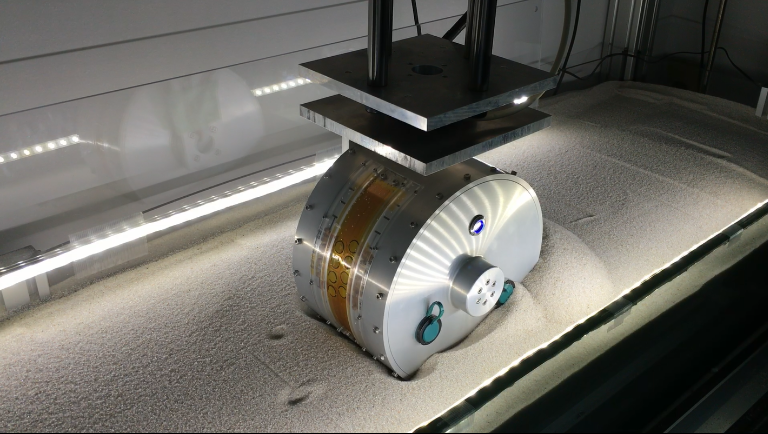
惑星探査ローバ用弾性車輪の設計開発および力学解析
軟弱地盤上を走行する車輪の滑りおよび沈下によるスタックは探査ミッションの失敗に繋がる危険があります.
本研究では,不整地におけるローバの走破性能向上を目的とし,荷重に応じて変形する弾性車輪の走行性能に着目しました.
FEM解析を用いて金属製センサ内蔵型弾性車輪の設計・開発を行い,多様な走行環境における同車輪と
土壌の相互力学関係の解析に取り組んでいます.
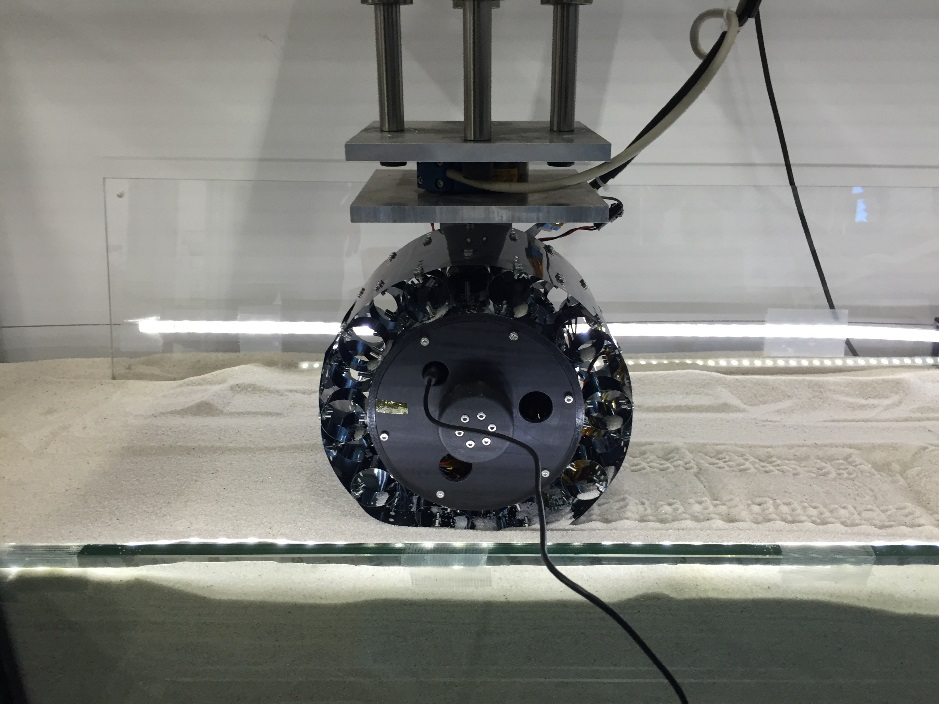
軟弱地盤走行時における車輪スタック現象の実験的考察
軟弱な土壌を走行する自律移動ロボットにとってスタック状態(走行不能状態)は
回避しなければならない状態です.しかし,スタック現象そのものの解明がされていません.
そこで,当研究室所有の車輪走行試験装置を用いて実験的にスタック現象を模擬し,
車輪と土壌の接地角度に着目してスタック現象の解明に取り組んでいます.
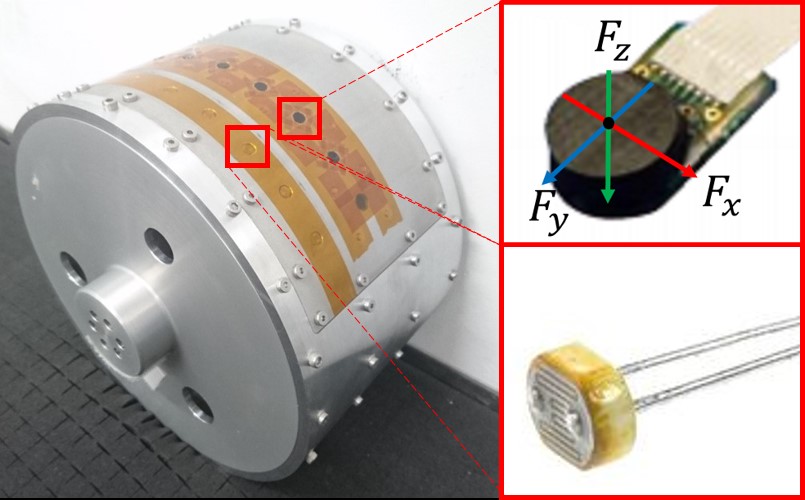
実験的検証に基づいた車輪土壌間の接触力学モデルの構築
3軸方向の力を測定可能な接触センサを導入することにより,従来では困難であった,車輪土壌間のせん断方向の応力を測定可能なセンサ内蔵型車輪の開発を行いました.本研究では,同車輪による軟弱地盤上での走行特性を高精度に計測することで,実験的なアプローチから車輪走行モデルの改善に取り組んでいます.
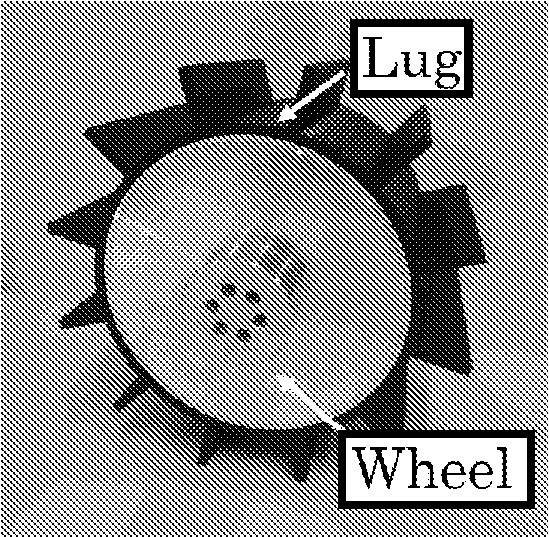
ラグ付き車輪を有する移動ロボットのエネルギ消費に基づいた斜面登坂性能解析
軟弱地盤を走行する車輪型移動ロボットの車輪には,走破性能を高めるためのラグとよばれる突起物が付いています.本研究では,このラグの効果について,ラグ高さが斜面登坂性能に与える影響を,エネルギー消費の観点に基づいて実験的に考察しています.さらに車輪の登坂軌跡と沈下の様相にも着目し,多角的な力学解析を行っています.
高精度な土壌掘削シミュレータの開発
本研究では,土壌掘削という対象物自体が変形する力学モデルをはじめ,走行部(履帯部)の接触力学,
建設機械全体のマルティボディダイナミクスまでを包含した掘削シミュレータの開発に取り組んでいます.
Resistive Force Theoryを応用したバケットによる土壌掘削力学モデルの構築
建設機械の自動化あるいは遠隔操縦において,高精度な施工計画検証シミュレーション,オペレータ訓練のための高忠実度なシミュレータ環境が求められます.特に,流動する土壌という変形する対象物と,バックホウのショベル間の接触力学モデルは重要です.本研究ではResistive Forth Theoryを応用し,掘削による土壌の盛り上がりを考慮した力学モデルの構築に取り組んでいます.さらに,提案モデルをロボット用シミュレータに組み込むことにより,建機のシミュレータの高精度化に寄与することが期待されます.
過去の研究
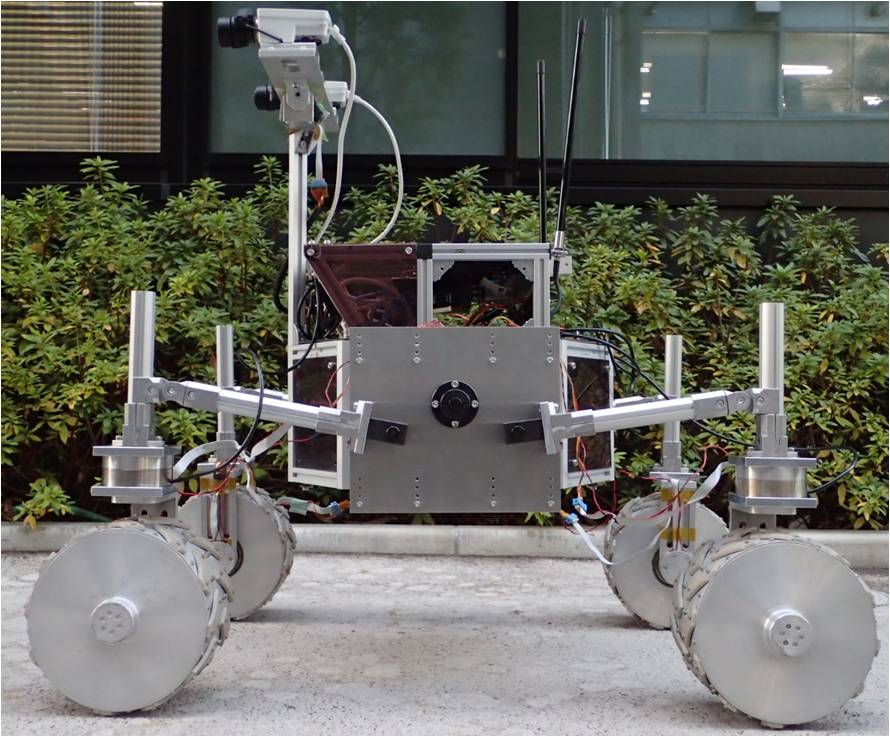
車輪移動型ロボットの斜面登坂性能向上を目的としたサスペンション開発
車輪移動型ロボットは,火山地帯起伏の激しい地形や砂地のような軟弱地盤を安定的に走破するため,
サスペンションを装備しています.これには「各車輪への荷重分配能力」,「段差乗り越え性能」,
「斜面登坂性能」といった3つの能力が備わっています.
本研究では,「斜面登坂性能」に着目し,ロボット本体を傾けさせることで重心移動を実現するサスペンション機構を設計開発しました.
前後輪の荷重負荷比を変化させることで軟弱斜面を効率よく登る方法を模索する取り組みを行っております.
車輪土壌間の応力ひずみ計測に基づく接触力学モデルの構築
本研究では,車輪実装型センサシステム(ASPL)から得られた車輪に直接作用する圧力(内界的物理情報)と,
粒子画像流速測定法(PIV)から得られる走行面の変形(外界的物理情報)を用いて,車輪の走行特性を多角的に解析しました.
この結果を踏まえ,ガウス分布に基づく接触力学モデルを構築し,実験データとの比較から妥当性を検証しました.
現在,モデルパラメータの物理的意味の考察に取り組んでいます.
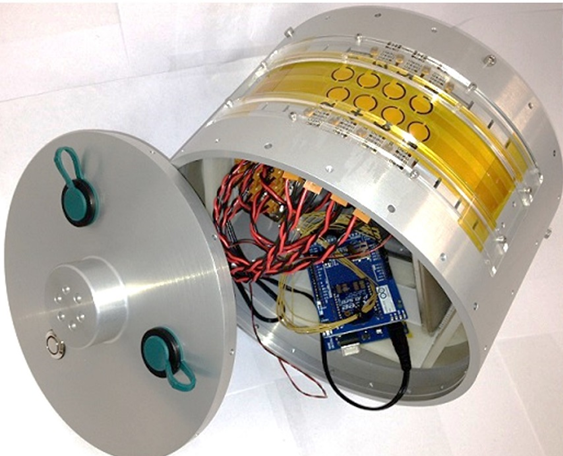
車輪実装型センサシステムを用いた砂地移動ロボットの走行特性計測
テラメカニクスに基づく車輪力学モデルやセンサ活用技術に関する知見を駆使し,
車輪実装型センサシステム(Advanced Sensor-wheel with Pressure and Light detection: ASPL)を開発しています.
ASPLの表面に圧力センサと光センサを搭載することによって,多様な滑りの状態下での,車輪・土壌間の圧力分布,
接地角度,沈下量といった各走行特性を直接的かつ高精度で計測することを 実現しています.
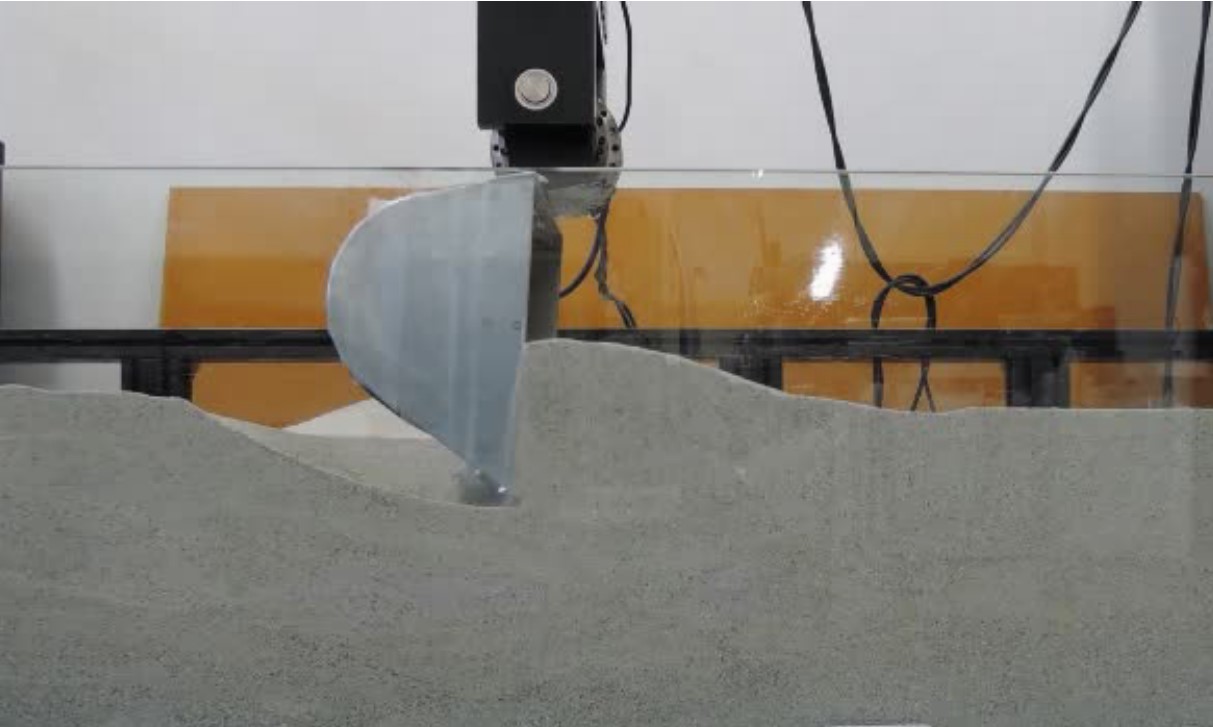
砂地におけるサンプリングツールの開発と力学モデル
砂地におけるサンプル採取には,従来シャベル型が用いられてきましたが, 最適な形状や採取方法,力学モデルは議論されてきませんでした.
本研究では,Ice Cream Disherのせん断動きに注目し,半球型のサンプリングツールを開発しています.
さらに,土質力学や粒子画像計測法(PIV)を用いた解析に基づいて,土壌掘削時の力学モデルの構築をおこない,効率的なサンプル採取方法やツール形状の提案,
さらにはマニピュレータの制御へと応用することを目指しています.
この研究は,土木建設機械の土壌掘削メカニズムや効率的な運用方法へと 援用することも期待できます.
Back
弾性車輪
車輪スタック現象の模擬
接触センサ内蔵型車輪
ラグ付き車輪
バケット掘削実験装置
サスペンション開発
PIVによる車輪の走行特性の解析
車輪実装型センサシステム:ASPL