Research Scope
The main mission of our group is to perform fundamental and applied research into the robotic mobility system, for an application to planetary exploration rovers and field robots.
Mobility Analysis
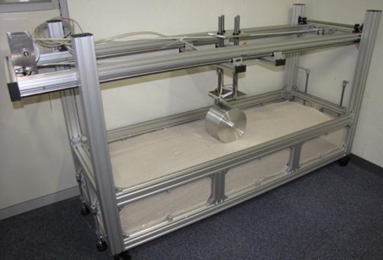
Terramechanics: Vehicle-Terrain Interaction Mechanics
Dynamic Simulation of Mobile Robot on Rough Terrain
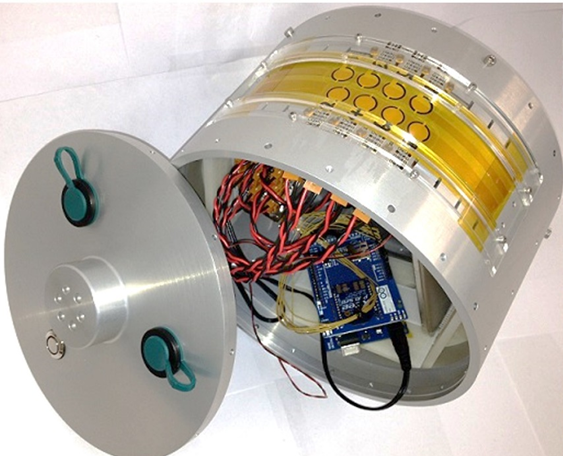
Development of In-Wheel Sensor System
Autonomous System
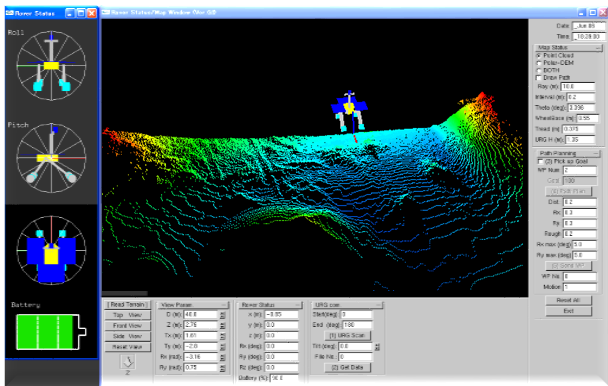
Vision/LIDAR-based Terrain Sensing
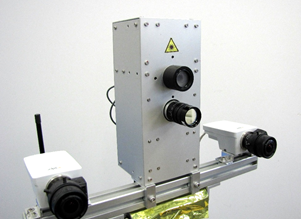
Development of Laser Range Imager
Planning, Navigation, and Control
Robot Development
Spherical-Omnidirectional Robot
Mobility Mechanism on Challenging Environemnt
Power Management System for Mobile Robot
Robotic Manipulation
Modeling of Tool-Soil Interaction Mechanics
Sampling Tool Development for Loose Sand
Energy-Efficient Control of Robotic Arm for Sand Samping