電源システム開発 ~Power System~
地球外惑星や火山地帯などの極限環境における無人移動ロボットによる探査は,近年より重要性を持つようになってきています.
そのような環境下には,基本的に電力の供給設備が存在していません.そのため極限環境における無人移動ロボット探査では,
自立的発電が可能な電源システムが搭載される必要があります.本研究班では電源の面から無人移動ロボット探査の可能性を高めるために,
電源制御手法の考案,システムの評価試験,省電力通信デバイスの開発と利用などに取り組んでいます.
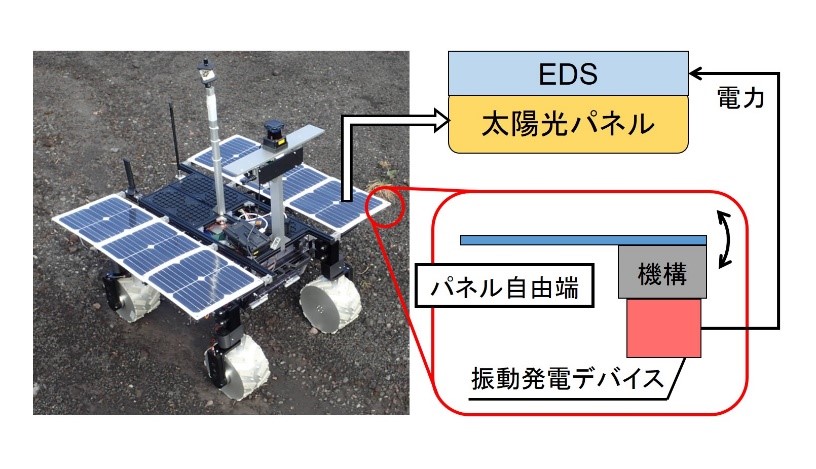
移動ロボット搭載太陽光パネルの除塵を目的とした振動発電デバイスの実証実験
移動ロボット搭載の太陽光パネル表面に積もった塵により発電量が低下することを防ぐため,除塵装置の開発が進められています.本研究では,この除塵装置に対する給電方法として,ロボット自体の振動から発電可能な振動発電デバイスを用いることを想定し,同デバイスの利用可能性,搭載位置,発電量などの実験的な検証をおこないました.
過去の研究
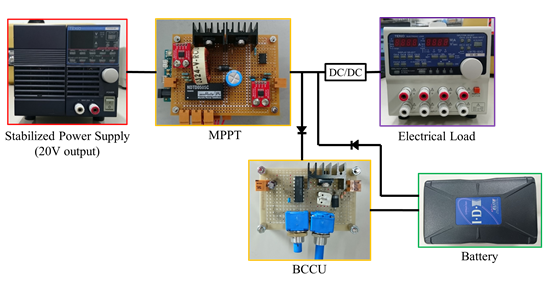
無人移動ロボットの電源制御システムにおける電圧制御手法の実験的評価
無人移動ロボットにおいて太陽光発電システムを運用するにあたり,最大電力追従装置(MPPT)というデバイスを導入し,
出力電圧の最大化を図る必要があります.本研究で実際のミッションを想定した日射量/ロボット負荷を基にした評価試験を通して,
電源制御手法の最適化を行い,より高効率な電源制御システムの構築を目指しています.
Back
振動発電デバイスの実証実験
電源制御システムの開発