自律移動システム ~Autonomous Mobility~
無人移動ロボットを用いた極限環境探査では,ロボットに搭載されたセンサによって,
周囲の環境情報を取得し,適切に危機回避を行いながら,動作計画を行うことが必要となります.
さらに遠隔地にいるオペレータがロボットを操縦する場合,通信遅延が大きな障害となるため,ロボット自身が自律的,
もしくは半自律的に移動することが求められます.
本研究グループでは,自律移動を実現する要素である「環境認識」「自己位置推定」「経路・動作計画」に関して,
フィールド試験またはシミュレーションを用いた研究,センサの開発を行っています.
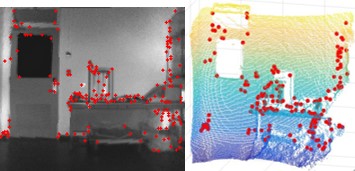
レーザ距離計における輝度画像の特徴点抽出を用いた地図生成手法
移動ロボットにおいて,レーザ距離計を用いて周囲環境の大域的な地図を生成することができます.
極限環境における探査には短時間,かつ高精度な地図が求められます.そのため位置合わせ手法の一つであるICP
(Iterative Closest Point)に,レーザ距離計より得られる輝度画像を用いて抽出した特徴点を利用することで,
計算コストと精度の両立する地図生成について研究を進めています.
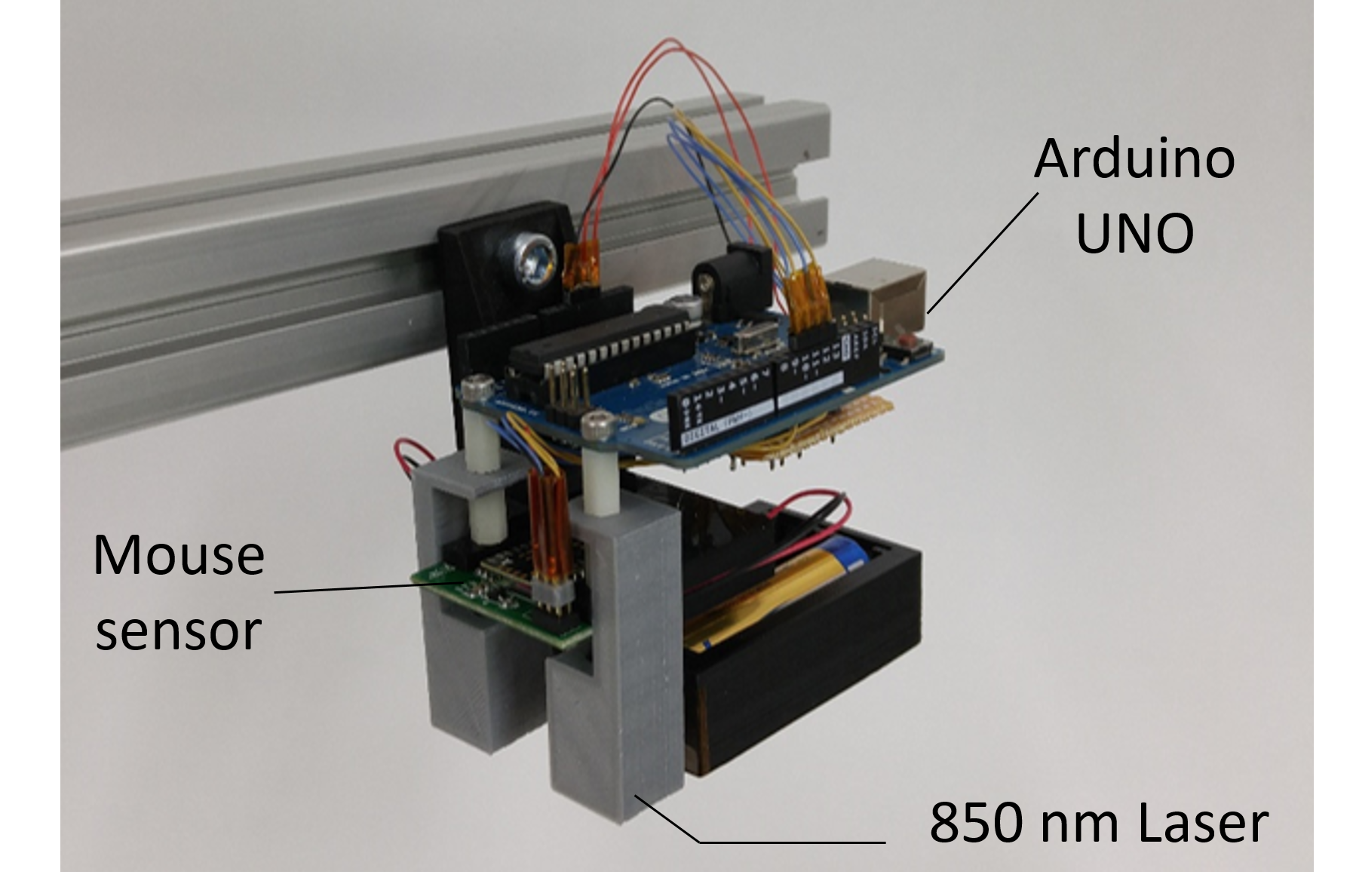
マウスセンサを用いた並進移動距離センサの開発
本研究では移動ロボットの初期位置から現在位置までの相対移動距離を計測する,
光学式マウスのカーソルを操作する原理を応用した距離センサの開発を行っております.
この技術を用いることで移動ロボットの車輪のスリップや,横滑りに影響されない位置推定を実現することが期待されます.
また,使用環境を整地から不整地に拡張するための技術開発も行っております.
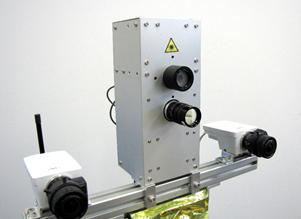
Laser Range Imager(レーザ距離画像センサ)の開発
ロボットの自律移動には三次元の地形環境認識が必須です. 本研究では,JAXA宇宙科学研究所と共同で小型低消費電力のレーザ測距装置を開発しています.
本センサを用いることによって,従来のステレオカメラ単体による手法よりも, 高速かつ安全な自律移動が可能になると期待されています.
ランダムサンプリングによる不整地移動ロボットの経路・動作計画
不整地移動ロボットは,障害物といった走行不可能領域の回避 (外的拘束) と,ロボットの駆動性能や操舵性能といった動作制約 (内的拘束) の両方を考慮した走行計画を実施する必要があります.そのためサンプリング手法の一つである RRT (Rapidly-exploring Random Trees) を利用し,移動ロボットの走破性と操縦性を同時に考慮することで,不整地上にて安全に移動可能な経路・動作計画手法を提案しています.
過去の研究
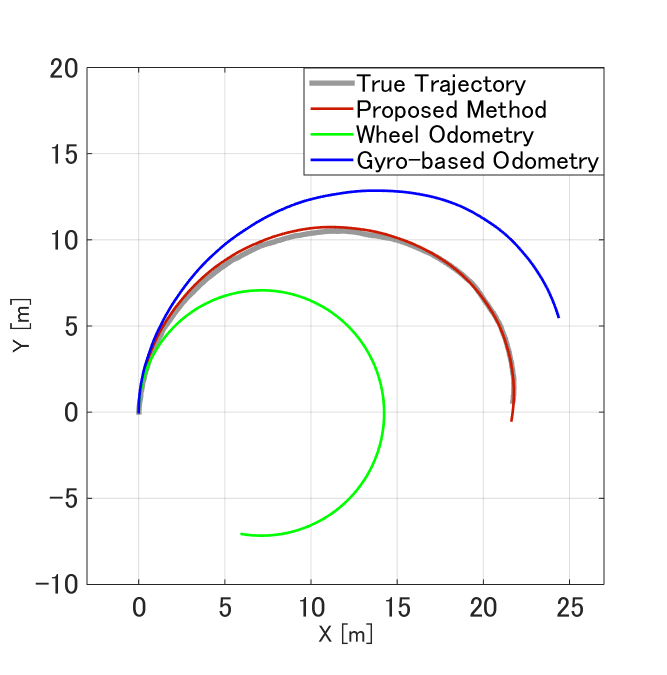
車輪型移動ロボットのステアリング特性に基づいたジャイロドメトリの高精度化
ジャイロドメトリとは,車輪に取り付けたエンコーダと本体に取り付けられたジャイロセンサから
得られる計測データを複合的に用いることにより,ロボットの位置や方向を推定する自己位置推定手法です.
従来の統計的な推定手法とは異なり,地面と車輪の力学関係から,スリップの大きさを推定し,
線形的に補正する手法を構築しています.
不整地移動ロボットの電力収支を考慮した経路・動作計画手法の構築
不整地移動ロボットは限られた供給電力(バッテリ,太陽電池パネル)のもとで動作しなければならず,
また,移動によって消費する電力を抑制する必要もあります.
よって本研究では,移動ロボットの経路計画に用いるコスト関数に対して,移動消費電力の項,太陽電池パネルによる発電量の項を加え
電力収支を考慮した経路生成を可能とする手法を提案しています.
惑星探査ローバ搭載を目的としたレーザ距離計の計測誤差モデルの構築
本研究では,レーザ距離計が有する計測誤差の発生傾向,度合を実験的に明らかにし,
実験結果に基づいて計測誤差の発生を確率的に記述するモデルを構築しています.
これにより,ロボットはレーザ距離計の計測誤差を仮定した地図作成,経路計画が可能となり,
未知環境においても安全にミッションを遂行することが可能となります.
レーザ距離計の輝度画像を用いた特徴点抽出の高度化
本研究では輝度画像を用いることにより暗所などの照明条件の悪い環境下において,
安定した特徴点抽出を行える手法の開発を行っております. 照明環境にロバストな輝度画像と,
テクスチャを取得できるカメラ画像を 相補的に用いた特徴点抽出手法を提案しています.
この技術は,レーザ距離計とカメラが搭載されたシステムへの応用が容易であり,
ロボティクスのほか,無人施工などの遠隔操縦用システムへの適用も期待されます.
Back