The surface of the Moon and Mars is assumed to be a soft ground environment covered with very fine sand (regolith). When a wheeled exploration robot runs on such a sandy ground, there is a risk of getting stuck due to the slippage of the wheel or sinking into the sandy ground. In this research, we are developing a mechanical model of a robot based on terramechanics, model evaluation by experimental methods, simulation analysis, and suspension design and development.
Contents
Previous research
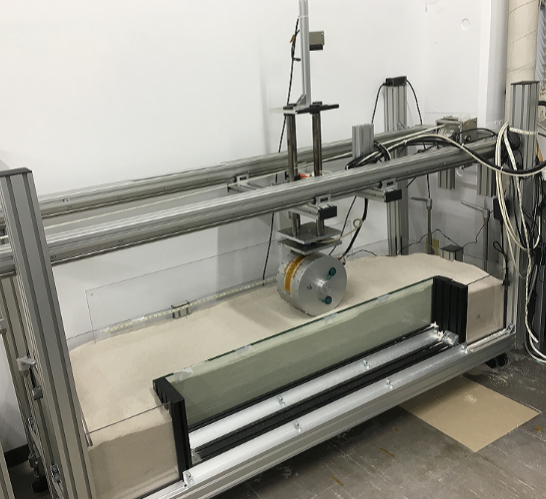
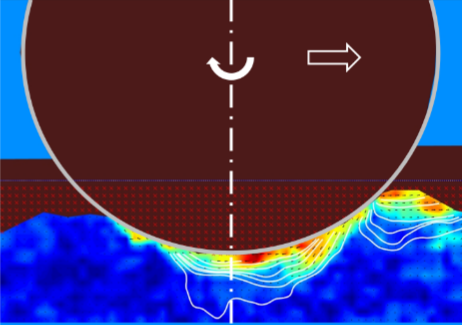
Experimental measurement of soil-track contact stress in steering motion on loose sand

The mobility system of the construction machine is often composed on track since the track shows high trafficability on loose terrain. Modeling of the dynamic interaction of the construction machine on loose terrain is essential for accurately predicting the vehicle motion and for reliably conducting its operation. Track-terrain interaction mechanics has been well investigated in the past while steering mechanics of the track remains an open issue. Therefore, this research aims to clarify the interaction mechanics of the steering track on loose sand using the following experimental apparatus: an in-track sensor and a track-steering testbed. The experiments using these two apparatuses reveal that the shear stress beneath the track shows a different tendency in its steering motion.
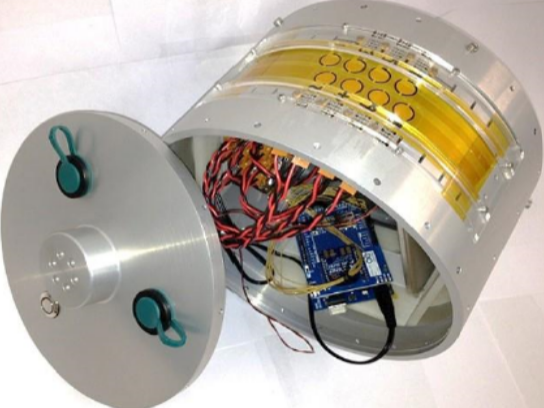
Analysis of powder and granular material behavior using an artificial gravity generator
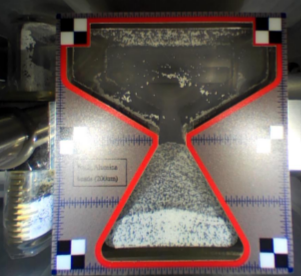
The characteristics of lunar sand (regolith) in low-gravity environments are still largely unknown. In this study, we qualitatively and quantitatively evaluated the properties of regolith powder under low gravity environment based on the data from the artificial gravity generator. The study also indicated the differences in the properties of powders and granules other than regolith using image data and other methods.
Experimental study of wheel stuck phenomenon on soft ground
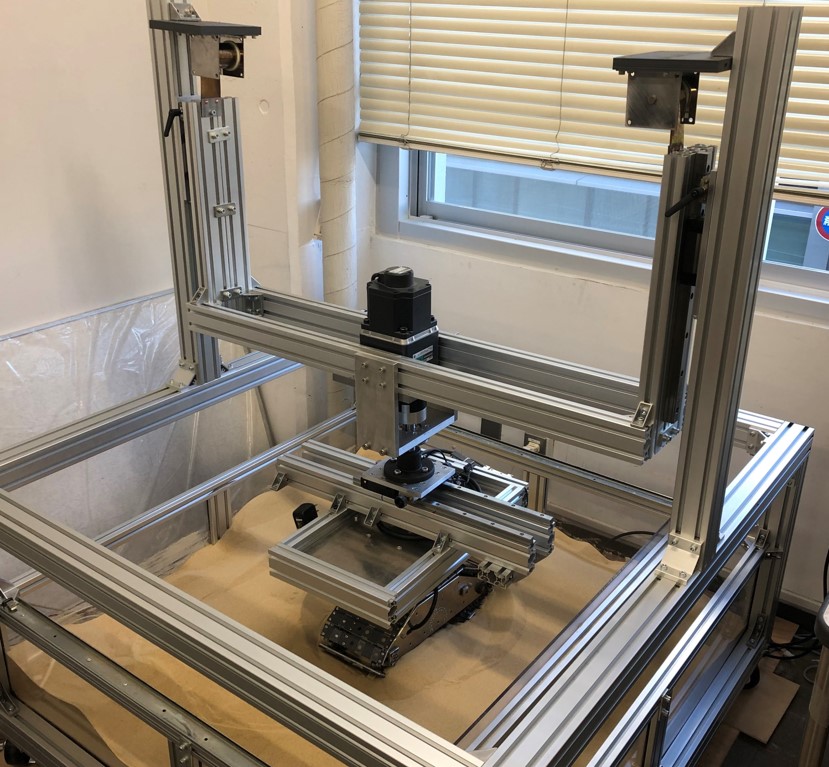
For an autonomous mobile robot traveling on soft soil, getting stuck is a condition that must be avoided. However, the stuck phenomenon itself has not been clarified. Therefore, this research aims to investigate the stuck phenomenon by experimentally simulating the stuck condition using our wheel-running test apparatus and focusing on the contact angle between the wheels and the soil.
Contact mechanics modeling between wheel and soil based on experimental validation
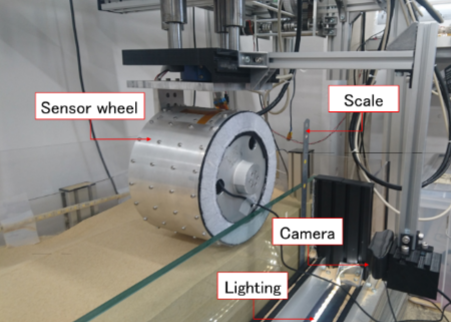
By introducing a contact sensor that can measure forces in three axial directions, we have developed a wheel with a built-in sensor that can measure shear stress between the wheel and the soil, which has been difficult to do in the past. This research is working to improve the wheel running model from an experimental approach by measuring the running characteristics of the wheel on soft ground with high accuracy.
Slope climbing performance analysis based on energy consumption of a mobile robot with lugged wheels

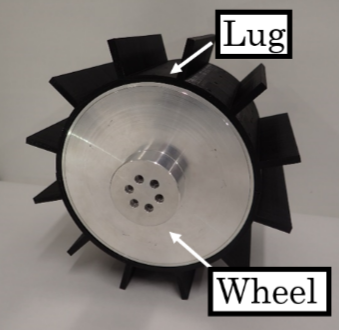
The wheels of a wheeled mobile robot traveling on soft ground are equipped with protrusions called lugs to enhance its running performance. In this study, the effect of these lugs on slope climbing performance is experimentally examined from the viewpoint of energy consumption. Furthermore, a multifaceted mechanical analysis is conducted by focusing on the trajectory of the wheel as it climbs the slope and the aspect of settlement.
Development of a high-precision soil excavation simulator
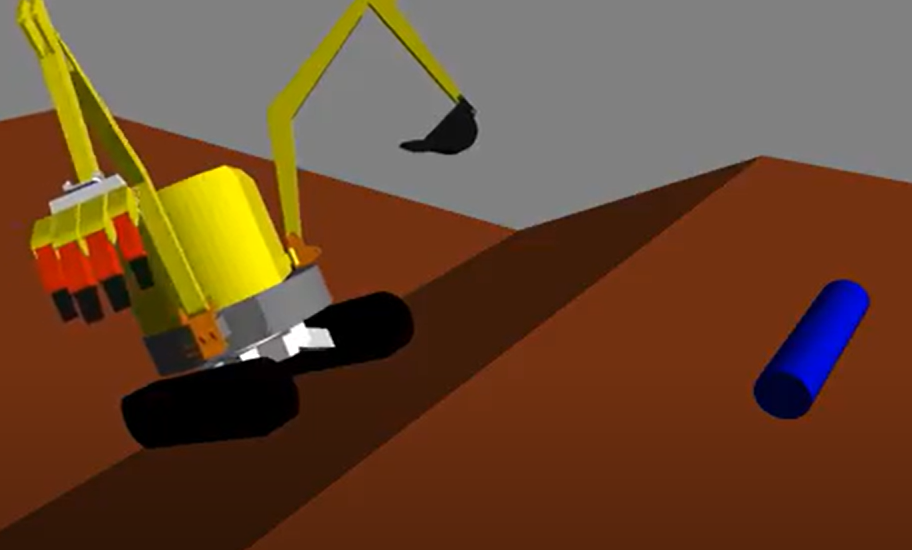
This research developed an excavation simulator that includes a mechanical model of the deformation of the object itself (soil excavation), the contact dynamics of the traveling part (crawler), and the multi-body dynamics of the entire construction machine.
Modeling of soil excavation mechanics with buckets using Resistive Force Theory
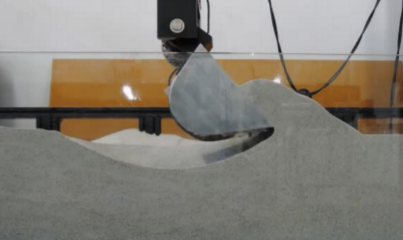
Automation or remote control of construction equipment requires a high-fidelity simulator environment for accurate simulation of construction plan verification and operator training. In particular, a contact mechanics model between a deformable object, such as flowing soil, and a backhoe excavator is important. In this study, we apply Resistive Force Theory to develop a mechanical model that takes into account the soil heave caused by excavation. Furthermore, by incorporating the proposed model into a simulator for robots, it is expected to contribute to improving the accuracy of simulators for construction machinery.