Robots that can operate in extreme environments are not limited to wheeled robots. In this research field, we are developing hopping robots that are useful in challenging terrain on the Moon and Mars, and underwater soft robots that can be used in marine environments. Further, we also carry out on research topics such as the dynamic analysis of robot as well as the development of robot arms that contribute to improving robotic performance in extreme environments.
Contents
Previous research
Design and Development of a flat, highly flexible underwater soft robot Design and Development of a flat, highly flexible underwater soft robot mimicking the invertebrate flatworm
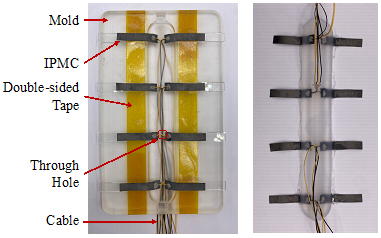
Due to their flexibility and adaptability, underwater soft robots can be used in marine ecosystem-rich environments such as coral reef areas. This enables them to perform tasks such as underwater resource surveys and underwater structure inspections in environments that are inaccessible to humans. In this study, we focused on the flatworm, an invertebrate with excellent swimming ability. By using IPMC actuators, we succeeded in developing a robot that is flat and flexible, yet swims by flapping its wings.
SRG
Experimental Analysis on Jumping Mechanism Using Snap-through Buckling of an Elastic Strip
Small, lightweight rovers with jump mechanisms are a promising mobility for lunar and planetary exploration of difficult terrains, such as craters and lava caves, which cannot be traversed by conventional wheeled robots. In this study, a simple and lightweight jumping mechanism based on snap-through buckling was devised. The mechanism (jumper) uses thin elastic strips to actively generate snap-through buckling and kick the ground to jump.
SRG
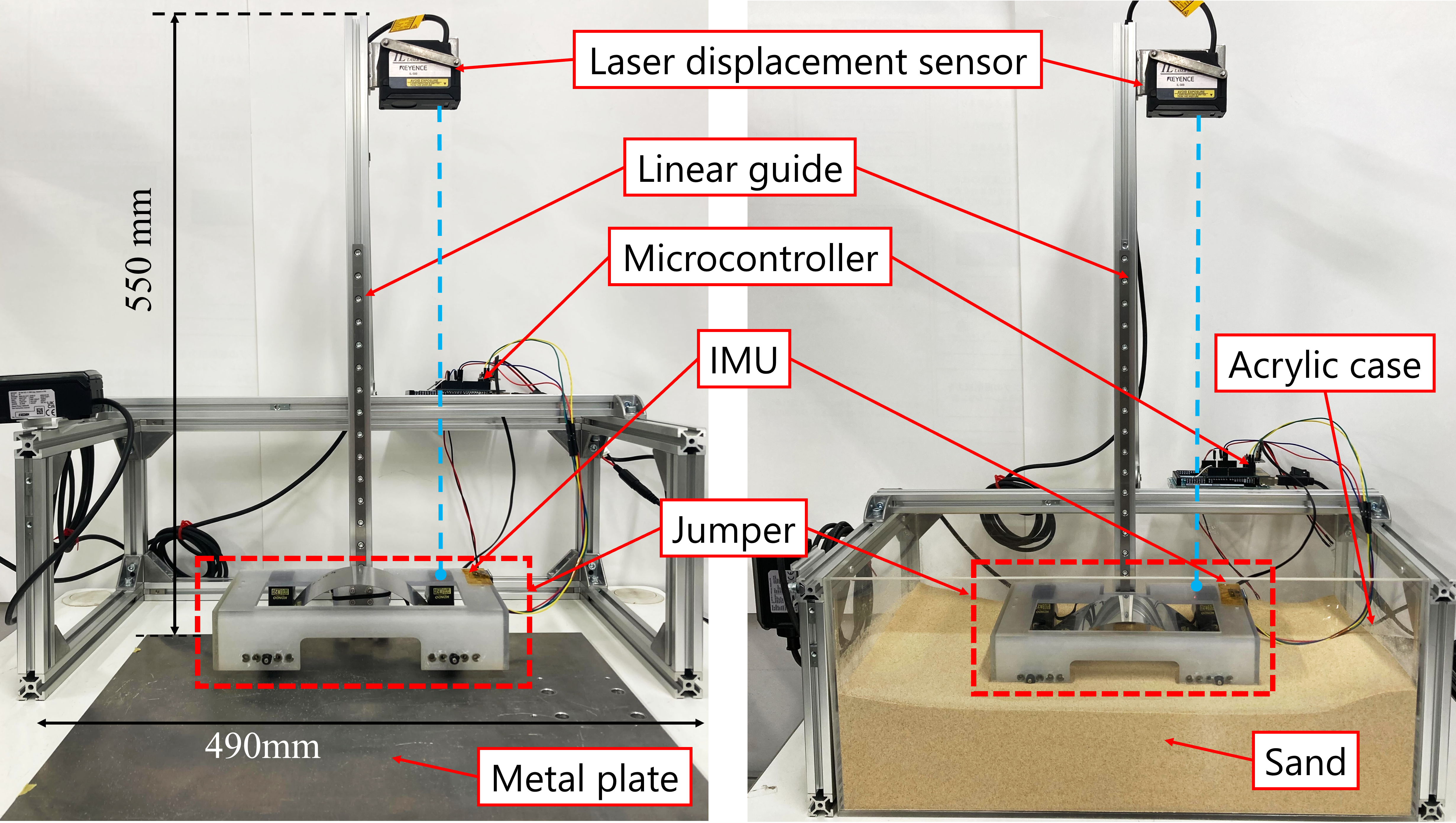
Development and Demonstration of Robotic Investigation Tool for Terrain Mechanical Property
The international space exploration roadmap developed by the NASA-led Artemis program and the International Space Exploration Collaborative Group focuses on building lunar infrastructure in the coming decades. For the construction of lunar infrastructure, it is essential to estimate the soil parameters of the lunar surface layer during the design phase of the construction. This study focuses on a parameter called “scale factor”, which represents soil hardness in a theory called Resistive Force Theory (RFT), and develops a small survey tool to identify the scale factor
SRG
Dynamic simulation of sky crane landing for Mars exploration rover

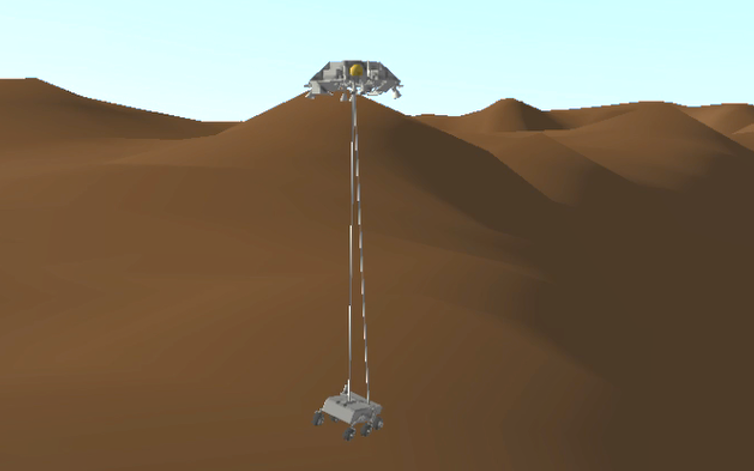
In this research, the mechanism enables the rover to land on sloped terrain by controlling the length of each bridle such that the rover posture is aligned with the slope angle during the sky crane landing. The proof of concept of the attitude control mechanism is verified through the simulation and also its effectiveness is highlighted by comparing it with a conventional approach.
SRG
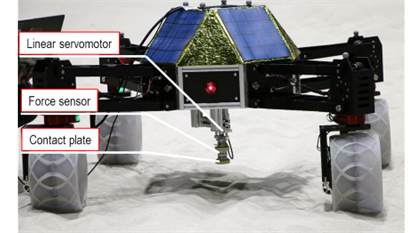
Simulation analysis on steering characteristics for vehicle design of manned pressurized lunar rover

Pressurized lunar rover is expected to be used in the future lunar human missions to expand the range and duration of the exploration. In this research, steering maneuverability is analyzed for a manned pressurized lunar rover. The simulation analysis results clarify the influence of each vehicle design parameter to the motion.
SRG
Model experiments in the landing behaviour of Mars orbiters based on the similarity rule.
JAXA’s Mars Moons eXploration (MMX) mission, scheduled for launch in 2024, requires the estimation of impact forces on the landing of a spacecraft to ensure its safety and to predict its behaviour after landing. In this study, a model drop experiment apparatus was developed based on a mechanical similarity law that takes into account the difference in gravity between the Martian satellite and the Earth. The impact force on the actual spacecraft is estimated from the impact force on the spacecraft model using the similarity law.
SRG
Development and behaviour analysis of a deployable robot with icosahedral shape
In order to understand the surface conditions and internal characteristics of asteroids, a robot is needed that can move around the planetary surface and explore it. Robots for asteroid exploration must be easy to transport to space, operate in a microgravity environment and be driven with low power consumption. Therefore, this laboratory is developing an icosahedral robot that can deploy and fold with a single drive source, and analysing the behaviour of the robot in microgravity.
SRG
Development of a spherical omni-directional observation robot
In 2012, the lunar orbiter SELENE discovered a longitudinal hole that is thought to be connected to a lava tube in the interior of the Moon. Lava tubes are considered to be an ideal environment for future lunar activity, and therefore, investigation of the interior of longitudinal boreholes is an important issue. Therefore, we are researching and developing a spherical omni-directional observation robot for special terrains and environments such as longitudinal boreholes.
SRG
Development of a robot hand drive system for an alternative support activity robot
Astronauts spend long hours outside the spacecraft performing tasks such as managing and assembling equipment, so the introduction of alternative support robots is attracting attention with the aim of reducing working time and avoiding hazards. In order to perform the above-mentioned tasks, robot hands that can grasp objects with a high grip force and assume arbitrary postures are required, but these hands tend to be large and complex. A drive system for the robot hand is therefore proposed, with the main aim of realising grasping and manipulation with a simple structure.
SRG
Manipulator control during soil/rock excavation
Conventional manipulators specialise in realising the function of the tool itself, such as cutting rock or excavating sand. However, planetary probes, which use solar power as their main source of electricity, require low-power operation of the robotic arm due to the extremely limited power available. In this study, a manipulator control method is investigated with the aim of improving the energy efficiency of soil sampling and drilling by the robotic arm with high efficiency and low power consumption.