We are researching and developing systems (guidance, navigation, and control) for robots to move autonomously in unknown environments. We are promoting research on environmental recognition, self-positioning, path planning, remote maneuvering, and integrated perceptual information processing using laser rangefinders and camera images.
Contents
Past research
Path Planning with Cable-obstacles Avoidance for a Tethered Mobile Robot in Unstructured Environments
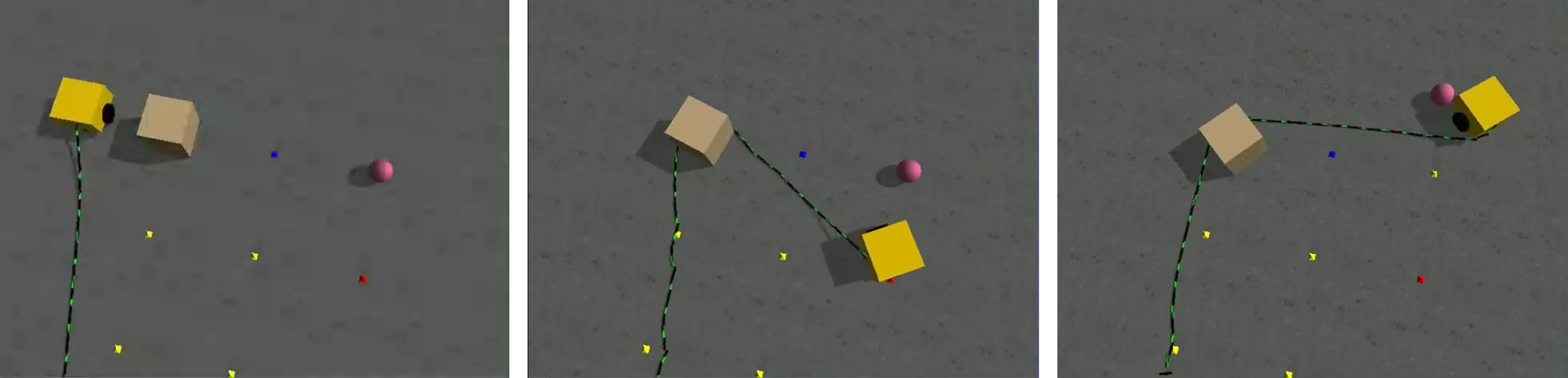
Tethered mobile robots for lunar and planetary exploration can extend the scientific return from unexplored areas that conventional mobile robots cannot traverse, such as steep slopes near lunar craters, lava tubes, or recurring slope lineae (RSL) on Mars. These robots use a cable for stable communication and power supply, improving maneuverability in unstable and challenging terrains. However, the cable can limit the robot’s range of motion and cause entanglement or contact with obstacles. These make the path planning difficult. This study presents a path-planning method that focuses on cable-obstacles avoidance for safer and longer exploration. The method modifies the pre-planned path based on its curvature, distance from the cable anchoring point, and distance from obstacles.
Energy-Efficient Path Planning for UAV Using Spatiotemporal Wind Model
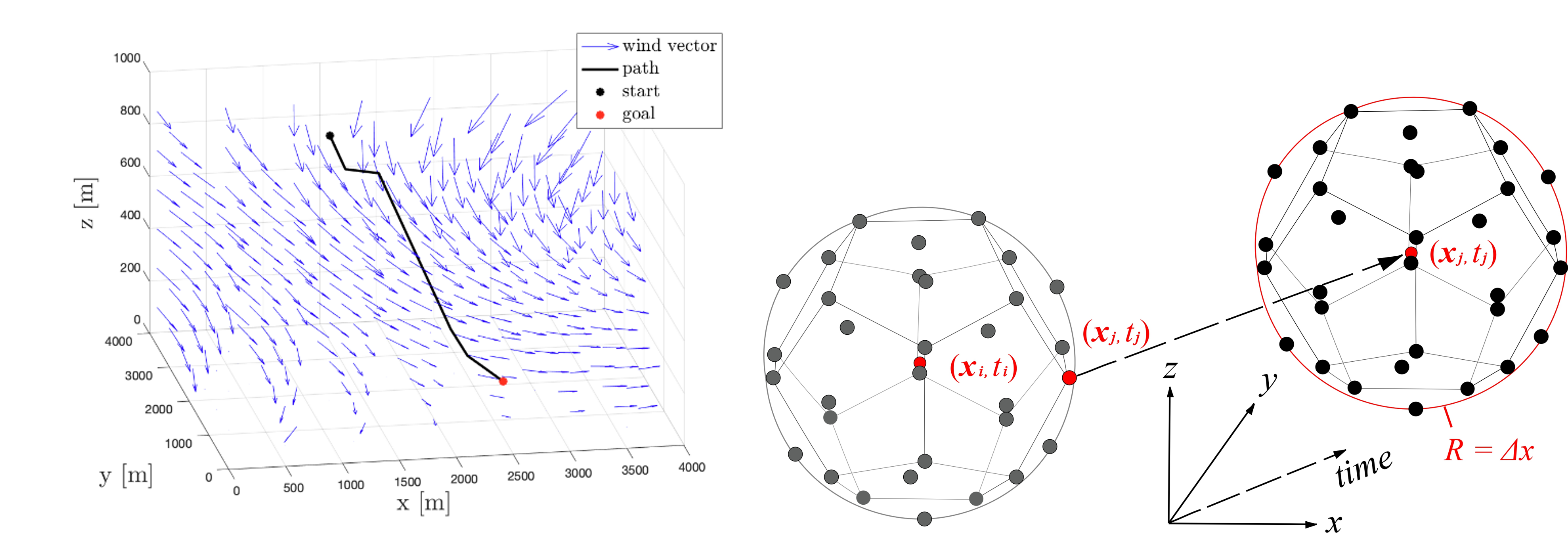
Unmanned aerial vehicles (UAVs) have been deployed in various applications. The UAVs are limited in their flight duration owing to the payload, battery capacity, or wind effects. To address the issue, we propose an energy-efficient path planning method for UAVs that explicitly considers spatiotemporal wind speed. The proposed method exploits the wind-based energy consumption model as the cost function and also implements a variable-resolution grid in the graph search. The simulation study with 648 scenarios confirms the validity of the proposed method. Further, the statistical analysis of the simulation results summarizes the impact of wind and freight mass on UAV path plannings.
Path Planning Method for Soil Investigation Using Mobile Robot
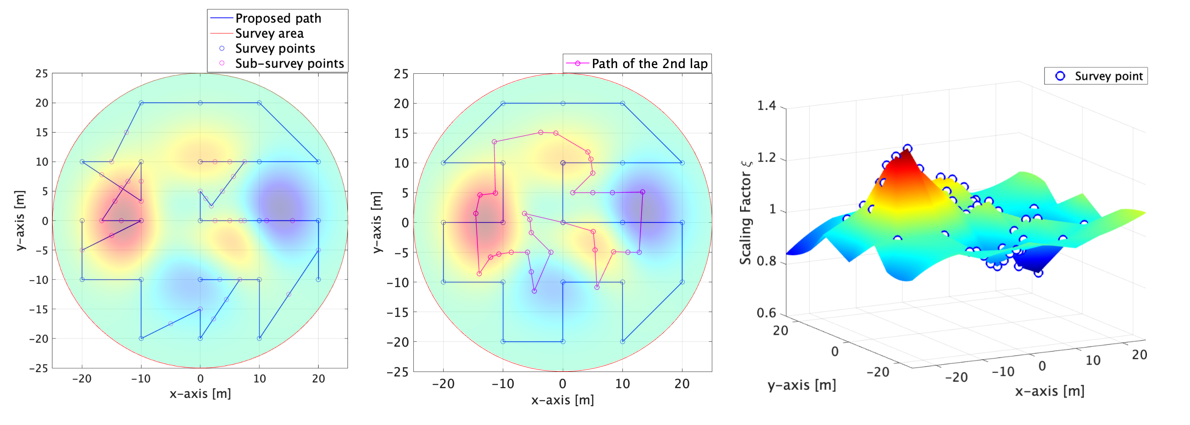
A lunar landing base is a key infrastructure for mass transportation from Earth to the Moon and for sustainable activities on the Moon in the future. Unmanned robots are expected to survey the soil stiffness of multiple points for securely constructing the landing infrastructure. There is a trade-off between the time or energy required for the survey, the number of survey points, and the completeness of the survey. This paper proposes a path planning for robotic soil investigation that determines the location and the number of additional survey points. The proposed method aims to obtain completeness of information related to the soil stiffness as well as to reduce the survey time. The simulation study reveals that the method achieves obtaining a certain level of completeness while it reduces the time required for the survey.
Path planning method taking into account the deviation of the vehicle on rough terrain
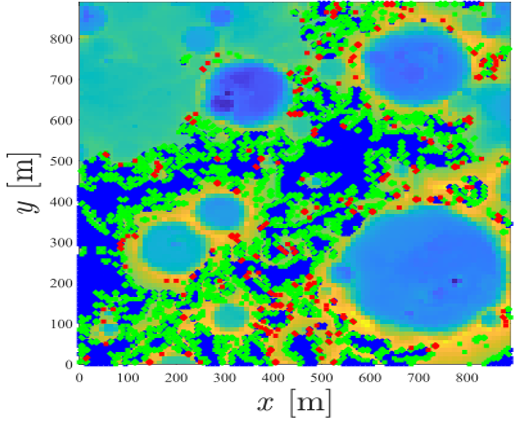
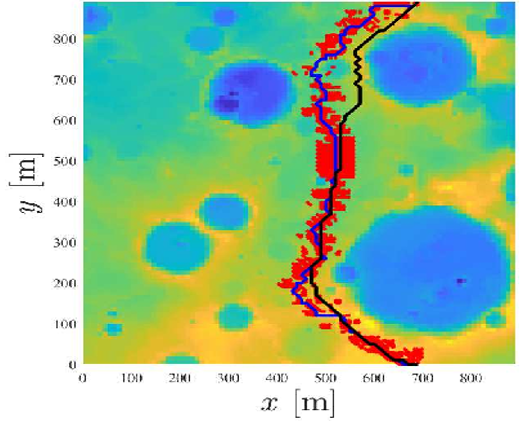
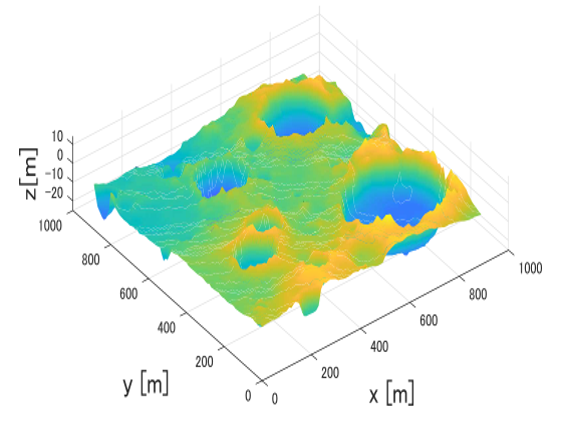
During planetary exploration missions, it is crucial to plan a route where the planetary rovers can reach its destination safely. However, when these rovers are traversing on the trail, the estimated driving force does not always match that in the real world. This can result in the rovers deviating from its planned path. This research proposes a new cost function that takes the rover deviation into account and evaluates this method using multi-point path planning simulations.