The main mission of our group is to perform fundamental and applied research into the robotic mobility system, for an application to planetary exploration rovers and field robots. We are conducting research on four topics below;
- Terramechanics
- Autonomous Mobility
- Robot Dynamics
- Machine Learning
Contents
Terramechanics

Crawler 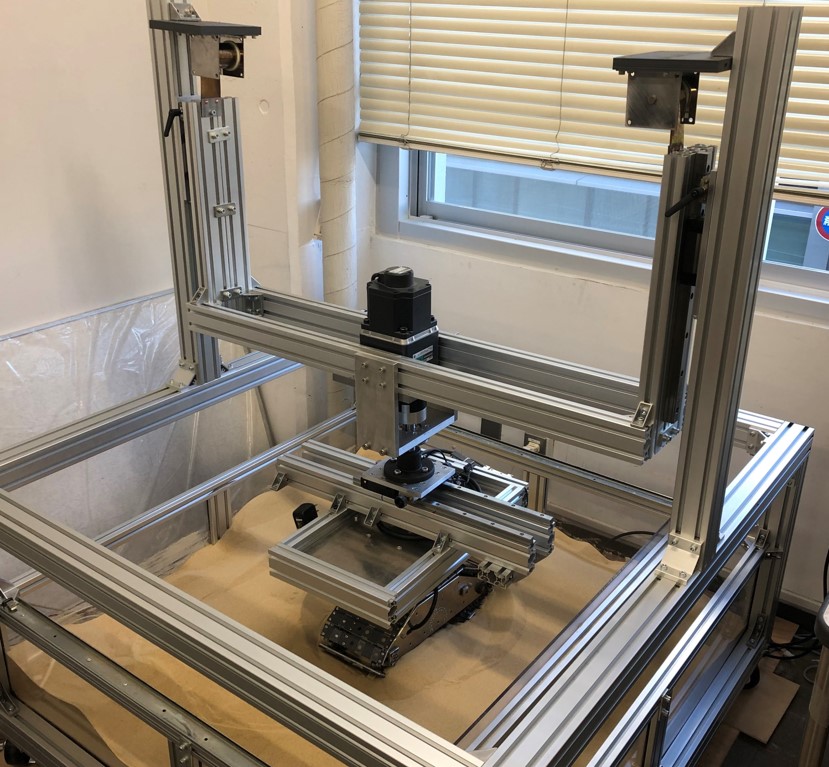
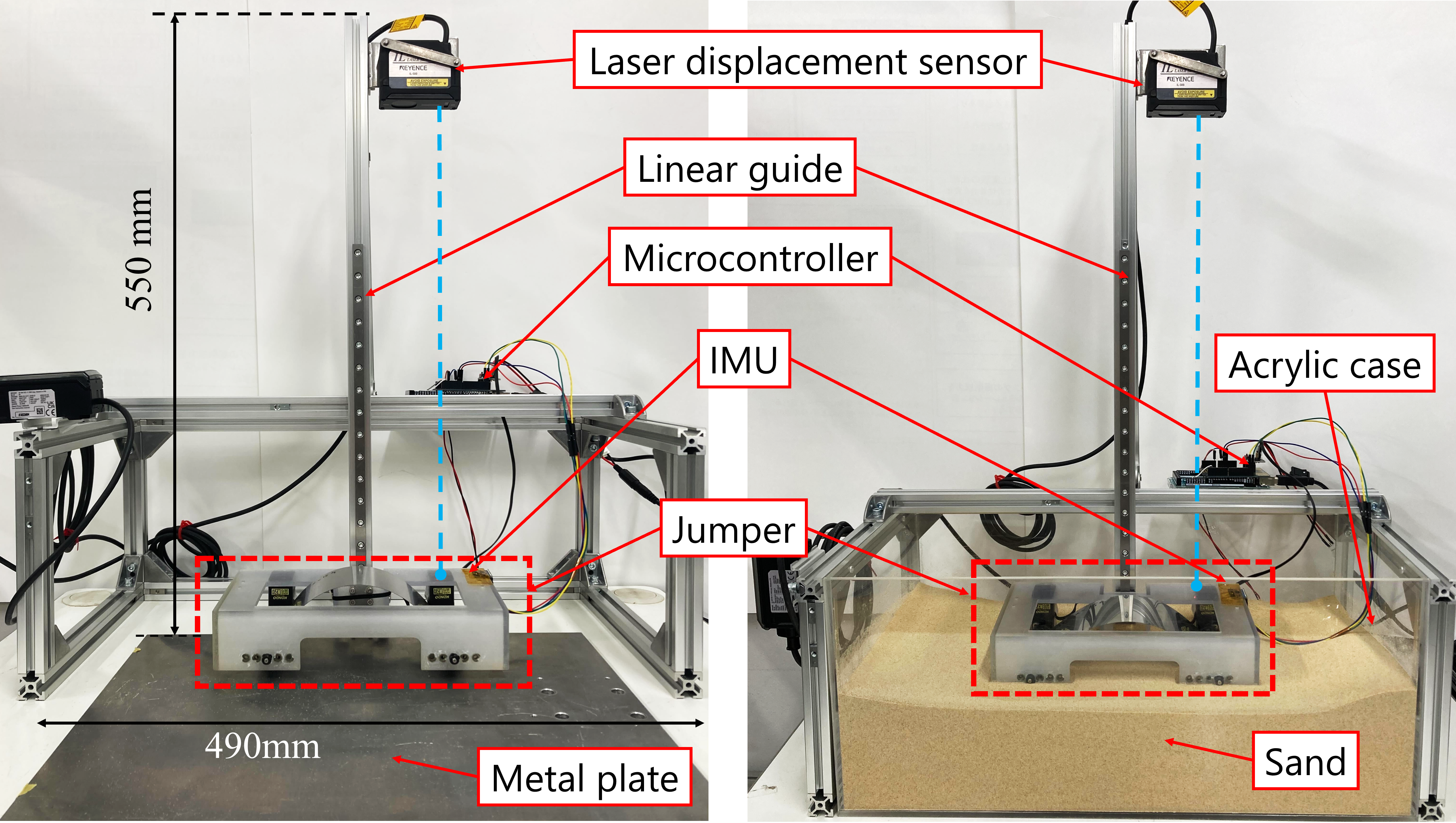
Swing test device 
Wheel experiment device
The surfaces of the Moon and Mars are expected to be covered with extremely fine sand (regolith) and soft ground. When a wheeled exploration robot travels on such sandy soil, the robot can easily get stuck as the wheels slip on the sand and sink into the sand. Therefore, based on the inter-dynamic relationship between machine and sand (which is called “Terramecanics”), we are developing a mechanical model of a robot traveling on ragged terrain, evaluating the model by experimental methods, conducting simulation analysis, and designing and developing a suspension system.
Previous research is here
Autonomous Mobility
Robot Dynamics
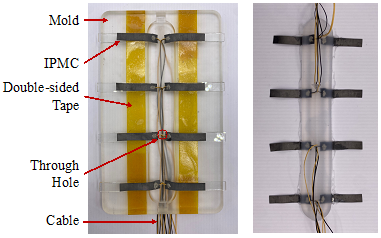
Robots that can operate in extreme environments are not limited to wheeled robots. In this research field, we are developing hopping robots that are useful in challenging terrain on the Moon and Mars, and underwater soft robots that can be used in marine environments. Further, we also carry out on research topics such as the dynamic analysis of robot as well as the development of robot arms that contribute to improving robotic performance in extreme environments.
Previous research is here