Research
本研究室では,月惑星探査ロボットをはじめ,極限環境を探査するロボットを主たる研究対象とし,
ロボットの力学特性の解明や移動システムに関する研究などを実施しています.
自律移動システム
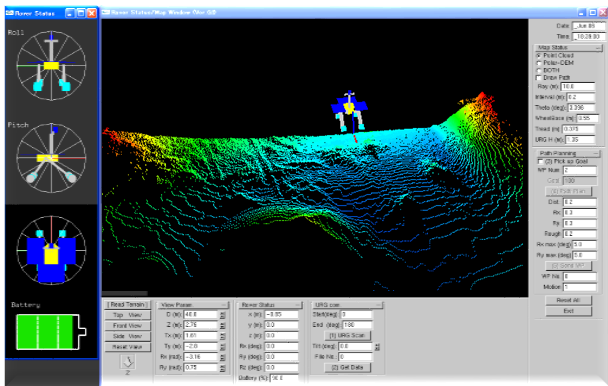
未知環境においてロボットが自律的に移動するためのシステム
(航法,誘導,制御=Guidance, Navigation, and Control)
の研究開発を行っています.レーザ距離計やカメラ画像を用いた環境認識,
自己位置推定,経路計画,遠隔操縦,統合的な知覚情報処理などの研究を
推進しています.
レーザ距離計の輝度画像を用いた特徴点抽出の高度化
本研究では輝度画像を用いることにより暗所などの照明条件の悪い環境下において,
安定した特徴点抽出を行える手法の開発を行っております.
照明環境にロバストな輝度画像と,テクスチャを取得できるカメラ画像を
相補的に用いた特徴点抽出手法を提案しています.
この技術は,レーザ距離計とカメラが搭載されたシステムへの応用が容易であり,
ロボティクスのほか,無人施工などの遠隔操縦用システムへの適用も期待されます.
GPSと慣性計測装置を用いた自己位置推定手法
本研究では,GPSなどに代表されるGlobalな位置姿勢情報と,
ロボットの慣性計測装置によるLocalな情報を統合し,
より安価で利便性の高い「Glocal(Global + local)」な自己位置推定
システムの構築を目指しています.
この技術は地上インフラに依存せずとも,誤差数センチ単位の高精度な
自己位置推定が期待でき,災害救助ロボットや,スマートフォンへの
実装も考えられます.
不整地におけるロボットの経路計画手法
本研究では自律移動システムの中でも,
未知環境における経路計画についての研究を
行っております.
経路計画アルゴリズムは,一般的に様々な指標(距離,走行安全性など)から
構成される評価関数を用いて,経路を生成しています.
とりわけ,各指標に対する重み付けについて,
機械学習に基づいた適応的な重み付け手法や,
経路計画アルゴリズムの策定といった複合的な研究を推進しています.
ランダムサンプリングによる不整地移動ロボットの経路・動作計画
不整地移動ロボットは,障害物といった走行不可能領域の回避(外的拘束)と,ロボットの駆動性能や操舵性能といった動的制約(内的拘束)の両方を考慮した走行計画を実施する必要があります.そのためサンプリング手法の一つであるRRT(Rapidily-exploring Random Trees)を利用し,移動ロボットの走破性と操舵性を同時に考慮することで,不整地上にて安全に移動可能な経路・動作計画手法を提案しています.