Research
本研究室では,月惑星探査ロボットをはじめ,極限環境を探査するロボットを主たる研究対象とし,
ロボットの力学特性の解明や移動システムに関する研究などを実施しています.
システムインテグレーション
ロボットは,駆動系や電源系,通信系,処理系など多様なサブシステムから構築されています.
我々の研究グループでは,各サブシステムの研究開発,およびそれらの統合(インテグレーション)にも
取り組んでおります.また,特殊な環境を探査するロボットシステムの提案もしております.
球型全方向観測ロボットの開発
2012年,月周回衛星SELENEによって,月内部の溶岩チューブに繋がっていると考えられる
縦孔が発見されました.溶岩チューブは,将来の月での活動の拠点を設営するのに最適な環境で
あると考えられており,そのために縦孔内部の調査は重要な課題となっています.
そこで,本研究では,縦孔をはじめとした特殊な地形,
環境を想定した球体型の全方向観測ロボットの研究,開発に取り組んでいます.
ロボット用発電システムの開発
惑星や火山などの極限環境において,移動ロボットを運用する場合,SAP(太陽電池パネル)による
自立的な電力の確保が不可欠になります。しかしながら,地形の起伏やロボットの移動に伴って,
電力発電量・消費量が大きく変化してしまいます.
本研究では,移動ロボットの電源制御システムの開発をおこなうとともに,
SAPからの電源供給量およびロボットの駆動による負荷量をモニターし,
ロボットの運用計画・動作計画へと適応的にフィードバックするシステム開発を目指しています.
Laser Range Imager(レーザ距離画像センサ)の開発
ロボットの自律移動には三次元の地形環境認識が必須です.
本研究では,JAXA宇宙科学研究所と共同で小型低消費電力のレーザ測距装置を開発しています.
本センサを用いることによって,従来のステレオカメラ単体による手法よりも,
高速かつ安全な自律移動が可能になると期待されています.
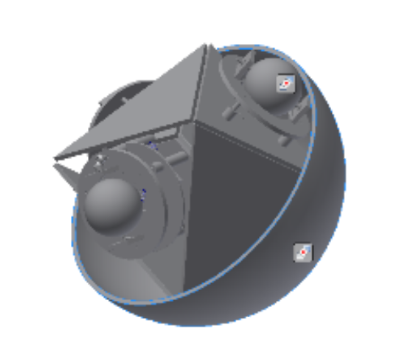
球型全方向観測ロボットの開発
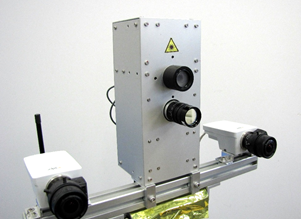
Laser Ranger Imager試作機(JAXA共同開発)