ロボットアーム ~Robotic Arm~
月や火星上における科学探査ミッションでは,着陸機あるいは移動ロボットに搭載されている
マニピュレータ(ロボットアーム)を用いて,地表面のサンプル採取あるいは土壌の掘削といった
タスクを実行します.
本研究では,マニピュレータの設計開発から,制御,さらには砂との接触力学現象の解明に
取り組んでおり,将来の地質探査や生命探査をより円滑に進めるツールの提案をおこなっていきます.
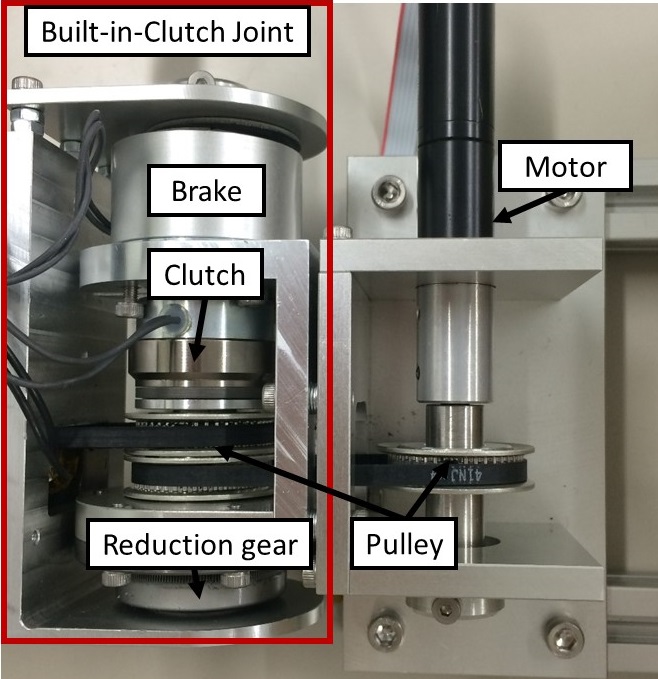
代替支援活動用ロボットに搭載するロボットハンド駆動システムの開発
宇宙飛行士は宇宙船外にて機器の管理・組立などの作業を長時間にわたり行うため,
作業時間の削減や危険性回避を目的とした代替支援ロボットの導入が注目されています.
上述の作業を行うためには,対象物を高握力で把持し,任意の姿勢をとることができる
ロボットハンドが必要となりますが,
これらは大型で複雑な機構になりやすい等の課題があげられます.
そこで,把持と操作を簡易な構造により実現することを主眼として,
ロボットハンドの駆動システムの提案を行っています.
土壌掘削時/岩盤掘削時のマニピュレータ制御
従来のマニピュレータは,岩石を削る,あるいは砂を掘削するといったツール自体の
機能を実現することに特化していました.
しかし,太陽光発電を主な電力源としている惑星探査機では,
使用できる電力が極めて限られているためロボットアームを低消費電力で運用する必要があります.
そこで本研究では,ロボットアームによる高効率かつ低消費電力な土壌サンプリング法ならびに
ドリル掘削時のエネルギ効率向上を目的とし,マニピュレータの制御法の検討を行っています.
Back
ロボットハンド駆動システム